
Cooled Infrared Detector for VOCs Gas Detection
-
摘要:
随着红外技术的发展,制冷红外探测器在气体探测领域发挥出重要作用。介绍了国内外关于制冷红外气体探测器的研究情况,并详细阐述了近期浙江珏芯微电子有限公司在挥发性有机物(volatile organic compounds,VOCs)气体探测器方向上的研究进展。通过窄带低温滤光片设计、杂散辐射抑制及探测器组件工艺等方面的关键技术研究,实现了制冷红外气体探测器的制备,在此基础上对探测器进行了系统性的性能评价与分析,展示了实际成像效果。
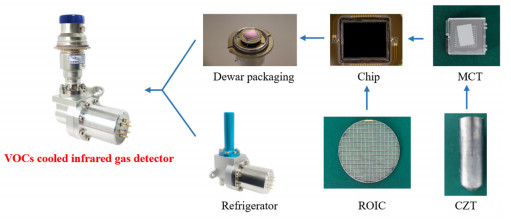
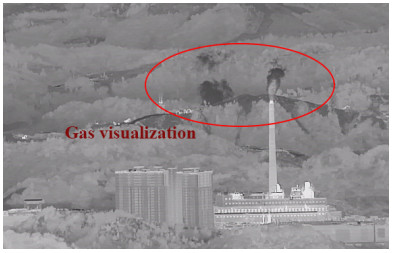
Abstract:With the development of infrared technology, cooled infrared detectors are playing an increasingly important role in gas detection. This paper introduces research on infrared gas detectors, domestically and abroad, and expounds on the recent research progress of Zhejiang Juexin Microelectronics Co., Ltd. on VOC gas detectors. The detectors were manufactured using a narrow bandpass filter design, stray radiation suppression, and detector assembly process technology. Moreover, a systematic performance evaluation and analysis of the detector were performed, and the actual imaging was displayed.
-
Keywords:
- cooled infrared detector /
- gas detection /
- VOCs
-
0. 引言
随着长波红外探测器技术的成熟,无论民品还是军品市场对于长波红外镜头的需求日益增长,尤其在车载无热化镜头,导引头用红外镜头等领域,而这些产品对镜头的成像质量、环境适应性、成本均有比较苛刻的要求。
比利时的Schuster N分别利用机械被动式、光学被动式和光学机械混合被动无热化方式,实现两片透镜系统-40℃~80℃的无热化设计,其焦距50 mm,F/1.3,波段8~13 μm。通过对比,他们证实利用光学机械混合被动无热化,可有效降低红外镜头无热化的成本[1]。
国内对于无热化镜头的研究主要集中在折衍混合消热差和硫系玻璃的运用上[2-4]。哈尔滨工业大学的关英姿等人对比了光学被动无热化和机械被动无热化的特点,指出无热化方案的选取应综合考虑性能、尺寸、重量、成本等方面的要求[5]。华北光电技术研究所杨加强等人,实现焦距25 mm,F/1的三片式无热化镜头设计加工[6]。镜筒材料选用铝,光学系统采用折衍混合的光学被动无热化方法,包含4个非球面和1个衍射面,总长32 mm。
所谓混合无热化即采用两种或两种以上的无热化方式,例如王学新等人研究了光学被动式和机电式组合消热差方法[7]。混合无热化的主要目的是克服单一无热化方式实现困难或需要较高投入的问题,以实现低成本、高性能的无热化效果。
1. 设计要求及思路
某导引头用长波红外无热化镜头的设计指标如表 1所示。其焦距要求较长,且探测器像元尺寸较小,需要光学镜头提供足够的能量,确定其F数为1。为满足弹载使用环境,要求体积重量尽可能小,且满足-40℃~60℃被动无热化。
表 1 设计指标要求Table 1. Requirements of design parametersParameters Value Focal length 75 mm Wavelength 8μm~12 μm Temperature -40℃~+60℃ F/# 1 Field of view 5.86°×4.69° MTF@42 lp/mm On axis>0.4 Out axis>0.3 Detector 640×512,12 μm 被动无热化分为光学被动式和机械被动式。光学被动式是选用不同的光学和结构材料,通过合理分配光焦度,加入衍射元件等方式实现消热差。机械被动式通常是利用不同膨胀系数的结构材料,在不同温度下通过结构设计驱动镜头整体或部分透镜轴向运动以补偿热离焦。光学被动式需要较为复杂的光学结构,设计难度大,限制因素多,但是其无热化效果较好。机械被动式成本较低,但是要利用多层镜筒结构,体积重量偏大,无热化效果也难以保证[8-10]。
本文所提的混合被动无热化方法是利用光学被动热化选用合适的材料和光焦度分配,实现单个透镜轴向微量移动以补偿热差,再利用较少的热补偿材料通过简单的结构形式驱动透镜按要求移动,以实现低成本、高性能的无热化效果。
2. 不同被动无热化光学设计对比
2.1 光学被动无热化
光学被动无热化设计时,承担主要光焦度的透镜,一般选用折射率温度系数较小的材料,并且通过加入衍射元件以进一步减小系统热差。针对表 1的指标要求,通过多轮优化,最终确定“硫系-锗-硒化锌”的光学被动无热化结构,如图 1所示。该系统3块透镜各有一个非球面,其中有一面为非球面与衍射面的结合。光学系统设计总长80 mm,总重257 g,全视场畸变小于等于0.7%。
图 2为-40℃、20℃、60℃时,特征频率42 lp/mm处不同视场调制传递函数MTF(modulation transfer function),可以看出不同温度下各视场成像质量满足技术要求。
利用光学设计软件进行公差分析。采用CODE V默认公差,像面移动为补偿器,结果显示中心视场MTF@42 lp/mm从设计值0.42降低到0.36的概率约为98%,其他视场考虑公差后MTF均大于等于0.26(概率98%)。常规加工装调精度即可满足系统要求。
2.2 混合被动无热化
混合被动无热化的主要目的是减小光学被动无热化的设计、加工难度,同时减小机械被动无热化的结构复杂度。为此,尽可能简化光学系统省去衍射面,减小加工难度;选取容易驱动,且对镜头整体外形包络影响较小的透镜作为热差补偿元件。
参考光学被动无热化结构形式,省去衍射面,并对光学材料进行调整,优化后选用“硫系-硫化锌-锗”的结构形式,如图 3所示。该系统每块透镜各有一个非球面,设计总长75 mm,总重248 g,全视场畸变小于等于1.3%。
图 4为-40℃、20℃、60℃下特征频率42 lp/mm处不同视场调制传递函数,可以看出不同温度下系统成像质量与光学被动无热化相当。
如图 3所示,透镜1和透镜2口径相对较大,如果选作热差补偿元件,在其径向设置机械被动调节机构会增大系统的体积、重量;而选择透镜3作为热差补偿元件,则可以有效减小调节机构的体积和重量,从而有利于系统的小型化、轻量化。因此,选择透镜3作为热差补偿元件。透镜3轴向移动以适应不同环境温度。为了减小透镜3的位移,利用多重结构兼顾各个温度下的成像质量和透镜3的移动量,使其尽可能小。如表 2所示,低温时透镜3向透镜2移动,为负值;高温时则反方向运动。
表 2 不同温度下透镜3的相对位移Table 2. Shift of the lens 3 under different temperatureTemperature /℃ -40 20 60 Displacement/mm -0.052 0 0.034 与光学被动无热化设计相同,采用CODE V默认公差,对系统进行公差分析,结果显示中心视场MTF@42 lp/mm以98%的概率,从设计值0.46降到0.36。反转灵敏度分析显示,该系统透镜1中心厚和中心偏公差比光学被动无热化系统稍严。但是,总体来说两种设计公差要求相当,常规加工装调精度均可满足要求。
3. 混合被动无热化结构设计
混合被动无热化只需简单的多层镜筒结构,驱动单个透镜移动即可。对所设计的混合被动无热化光学系统进行结构设计,如图 5所示。镜筒、隔圈、压圈等材料选用铝合金,选用线膨胀系数较大的聚甲醛(POM, polyformaldehyde)作为热补偿材料。设计3层镜筒结构,中间层为POM,其前后两端分别与外层、内层镜筒粘接。温度变化则POM热胀冷缩,能够驱动透镜3按照设计所需的规律移动。
![]() 图 5 混合被动无热化结构示意图Figure 5. Mechanical schematic diagram of hybrid passive athermalization
图 5 混合被动无热化结构示意图Figure 5. Mechanical schematic diagram of hybrid passive athermalization为了保证不同温差ΔT,透镜3的相对移动量ΔL满足光学设计要求,POM的长度Lpom必须满足一定条件。如图 5所示,透镜2与透镜3的安装基准距离L0,镜筒材料的线膨胀系数α,POM的线膨胀系数αpom,则Lpom应该满足公式:
$$ {\mathit{L}_{{\rm{pom}}}}({\mathit{\alpha }_{{\rm{pom}}}} - \mathit{\alpha }) + {\mathit{L}_0}\mathit{\alpha } = \Delta \mathit{L}/\Delta \mathit{T} $$ 为验证结构设计的合理性,通过有限元仿真分析不同环境温度下各透镜的间隔变化。对透镜与镜筒,透镜与隔圈等选择适合的约束,施加均匀温度场载荷,选取各透镜中心节点,获得不同温度下的位移量如表 3。与表 2相比误差≤0.02 mm,满足不同温度下间隔公差要求。
表 3 仿真分析不同温度下透镜3的位移Table 3. Shift of lens 3 under different temperature by simulationTemperature /℃ -40 20 60 Displacement /mm -0.053 0 0.032 4. 两种无热化方案对比
对比结构设计完成的两种无热化镜头,如表 4所示。可以发现混合被动无热化的成像质量、重量与光学被动无热化相当,但是体积和加工难度上明显优于光学被动无热化。从而证实,混合被动无热化技术可实现低成本、高性能的无热化效果。
表 4 两种无热化方案对比Table 4. Comparison of different athermalization methodsPassive optical athermalization Passive optical and mechanical athermalization Weight 356 g 354 g Volume φ75 mm×80 mm φ75 mm×75 mm MTF On axis≥0.42 On axis≥0.46 Out axis≥0.38 Out axis≥0.37 Distortion ≤0.7% ≤1.3% Complexity 3 aspheric surface
1 diffractive surface3 aspheric surface 5. 总结
针对某焦距75 mm,F/1长波非制冷无热化镜头的研制需求,分别利用光学被动无热化和混合被动无热化两种方式设计实现。对比两种镜头的体积、重量、加工难度、成像质量等,可以看出混合被动无热化可以有效降低被动无热化镜头的设计难度、加工成本和体积。从而证实,混合被动无热化技术适用于低成本、高质量的被动无热化镜头设计开发。
-
![]()
![]()
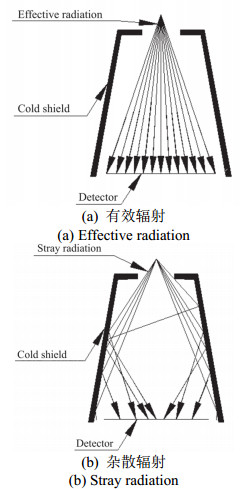
图 7 到达探测器焦平面的红外辐射示意图[17]
Figure 7. Schematic diagram of infrared radiation reaching the focal plane
![]()
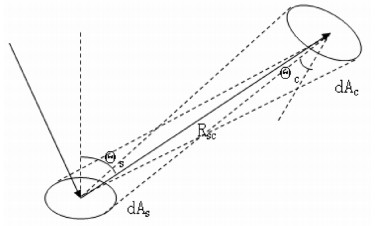
图 8 辐射能量在两个表面的传输示意图
Figure 8. Schematic diagram of radiant energy transmission between two surfaces
![]()
图 9 制冷红外气体探测器组件工艺流程
Figure 9. Process flow diagram of cooled infrared gas detector assembly
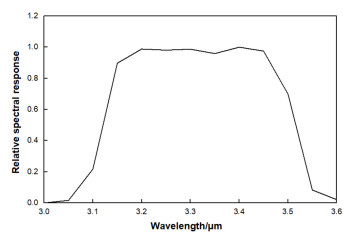
表 1 制冷红外气体探测器相对光谱响应测试数据
Table 1 Test data of relative spectral response of cooled infrared gas detector
Wave-length/μm Relative spectral response Wave-length/μm Relative spectral response Wave-length/μm Relative spectral response Wave-length/μm Relative spectral response Wave-length/μm Relative spectral response 3.00 0.000 3.15 0.897 3.30 0.987 3.45 0.975 3.60 0.021 3.05 0.016 3.20 0.988 3.35 0.959 3.50 0.699 / / 3.10 0.217 3.25 0.981 3.40 1.000 3.55 0.083 / /  下载: 导出CSV
下载: 导出CSV
表 2 各厂商制冷红外气体探测器对照情况
Table 2 Comparison of different cooled infrared gas detectors
Specification FLIR
GF×320(OGI)Opgal
EyeCGas2.0(OGI)IRnova
Freja330(Detector)Juexin
JQ04(Detector)Detector type InSb InSb T2SL MCT IR resolution 320×240 320×240 320×256 320×256 Detector pitch/μm 30 / 30 30 NETD/mK <10 <10 <10 <10 Spectral range/μm 3.2 to 3.4 3 to 4.4 3.2 to 3.4 3.2 to 3.4 F-number 1.5 1.1 2 1.2 Voltage/V 12 12 12 12 Size/mm 305×169×161 230×130×110 142×71×57 118×72.3×51 Weight / 2.6 kg 550 g <350 g
下载: 导出CSV
表 3 红外气体探测器环境适应性试验参数
Table 3 Environmental adaptability test parameters of infrared gas detectors
Number Environmental adaptability Test conditions 1 Operating temperature −40℃~+70℃ 2 Storage temperature −55℃~+70℃ 3 Thermal shocks a) Max temperature: +70℃, Min temperature: −55℃;
b) Holding time: 1 h;
c) Conversion time: ≤5 min; d) Cycles: 5 times4 Vibrations 10~80 Hz, 0.02 g2/Hz
80~350 Hz, 0.04 g2/Hz
350~500 Hz, 0.04 g2/Hz~0.02 g2/Hz
15 min per axis5 Mechanical shocks 1/2 sine 40 g 18 ms, 3 shokcs per axis per direction
1/2 sine 50 g 11 ms, 3 shokcs per axis per direction
下载: 导出CSV
-
[1] 生态环境部. 生态环境部关于印发《重点行业挥发性有机物综合治理方案》的通知[EB/OL]. [2019-6-26][2023-1-15]. https://www.gov.cn/gongbao/content/2019/content_5442284.htm. Ministry of Ecology and Environment of People's Republic of China. Comprehensive Management Plan for Volatile Organic Compounds in Key Industries[EB/OL]. [2019-6-26] [2023-1-15]. https://www.gov.cn/gongbao/content/2019/content_5442284.htm.
[2] 生态环境部. 挥发性有机物无组织排放控制标准: GB37822-2019[S]. [2019-07-27]. 上海: 华东理工大学. Ministry of Ecology and Environment of People's Republic of China. The discharge standard and measurement methods of pollutants from paint manufacturing: GB37822-2019[S]. [2019-07-27]. Shanghai: East China University Of Science And Technology.
[3] 刘秀, 王岭雪, 金伟其, 等. 危险气体泄露的光学遥测技术及其进展[J]. 红外技术, 2009, 31(10): 563-567. DOI: 10.3969/j.issn.1001-8891.2009.10.002 LIU Xiu, WANG Lingxue, JIN Weiqi, et al. The development of optical remote measurement for hazardous gas leakage[J]. Infrared Technology, 2009, 31(10): 563-567. DOI: 10.3969/j.issn.1001-8891.2009.10.002
[4] 俞新发, 闫荣鑫, 钟亮, 等. 航天器红外成像检漏方法研究[J]. 航天器环境工程, 2012, 29(2): 220-226. DOI: 10.3969/j.issn.1673-1379.2012.02.021 YU Xinfa, YAN Rongxin, ZHONG Liang, et al. Research on infrared imaging leak detection method of spacecraft[J]. Spacecraft Environment Engineering, 2012, 29(2): 220-226. DOI: 10.3969/j.issn.1673-1379.2012.02.021
[5] 张旭, 金伟其, 李力, 等. 天然气泄露被动式红外成像检测技术及系统性能评价研究进展[J]. 红外与激光工程, 2019, 48(S2): 53-65. ZHANG Xu, JIN Weiqi, LI Li, et al. Research progress on passive infrared imaging detection technology and system performance evaluation of natural gas leakage[J]. Infrared and Laser Engineering, 2019, 48(S2): 53-65.
[6] 熊仕富. 红外热成像甲烷气体探测与识别系统关键技术研究[D]. 长春: 长春理工大学, 2012. XIONG Shifu. Studies on Key Technology of Infrared Thermal Imaging Detection and Identification System for Methane Gas[D]. Changchun: Changchun University of Science and Technology, 2012.
[7] Furry D, Richards A, Lucier R, et al. Detection of volatile organic compounds (VOC′s) with a spectrally filtered cooled mid-wave infrared camera[C]//Infra Mation 2005 Proceedings, 2005: ITC 108A 2005-06-01.
[8] Teledyne Flir. FLIR GFx320-本质安全型防爆红外热像仪[EB/OL]. [2023-01-15]. https://www.flir.cn/discover/instruments/gas-detection/flir-gfx320/. Teledyne Flir. FLIR GFx320- Essentially Safe (ES) Infrared Thermal Camera [EB/OL]. [2023-01-15]. https://www.flir.cn/discover/instruments/gas-detection/flir-gfx320/.
[9] Teledyne Flir. FLIR GFx320[EB/OL]. [2023-01-15]. https://www.flir.cn/support/products/gfx320/.
[10] Lynred. SCORPIO BB MW[EB/OL]. [2023-01-15]. https://www.lynred.com/products/scorpio-bb-mw/.
[11] IRnova. T2SL Freja 330[EB/OL]. [2023-01-15]. https://www.irnova.se/products/freja-330/.
[12] Opgal. EYECGAS Multi Methane, Vocs & CO2[EB/OL]. [2023-01-15]. https://www.opgal.com/products/eyecgas/.
[13] 唐璟, 罗秀丽, 刘绍华, 等. 石油和天然气红外成像检漏[J]. 激光与红外, 2016, 46(1): 62-66. TANG Jing, LUO Xiuli, LIU Shaohua, et al. Infrared imaging detection of oil and natural gas leakage[J]. Laser & Infrared, 2016, 46(1): 62-66.
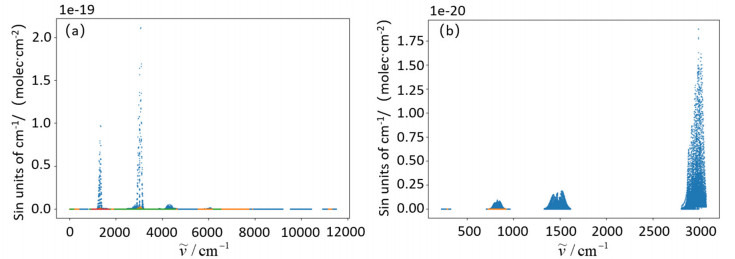
[14] HITRAN. Absorption cross section search[EB/OL]. [2023-01-15]. https://hitran.org/data-index/.
[15] 田亚, 张磊, 林国画, 等. 红外带通滤光片77 K光谱漂移特性实验研究[J]. 红外, 2020, 41(5): 19-23. TIAN Ya, ZHANG Lei, LIN Guohua, et al. Experiment research on spectrum drift characteristic at 77 K of infrared band-pass filters[J]. Infrared, 2020, 41(5): 19-23.
[16] 付志凯, 魏威, 张磊, 等. 不同冷屏黑化工艺对红外探测器性能的影响[J]. 红外, 2019, 40(11): 17-22. FU Zhikai, WEI Wei, ZHANG Lei, et al. Influences of different blackening process of cold shield on the performance of infrared detectors[J]. Infrared, 2019, 40(11): 17-22.
[17] 尹爽, 徐世春, 高玲, 等. 冷屏结构与冷屏效率[J]. 红外与激光工程, 2021, 50(3): 20200223. YIN Shuang, XU Shichun, GAO Ling, et al. Structure and efficiency of cold shield[J]. Infrared and Laser Engineering, 2021, 50(3): 20200223.
[18] Robert P B, Problems and techniques in stray radiation suppression[J]. SPIE, 1977, 107: 2-23.
[19] ZHANG Yan, LIU Dafu, HE Xiangrong, et al. Stray light in infrared detector[C] Pro. of SPIE, 2009, 7383: 331-339.
[20] 汪洋. 红外探测器组件杂散光分析及抑制研究[D]. 北京: 中国科学院大学, 2016. WANG Yang. Study on suppression and analysis of stray light in infrared detector assembly[D]. Beijing: University of Chinese Academy of Science, 2016.
[21] 熊雄, 段煜, 胡明灯, 等. 640×512小型化红外探测器杜瓦组件可靠性研究[J]. 红外技术, 2022, 44(1): 89-95. http://hwjs.nvir.cn/article/id/0320e799-acda-455d-ad0b-301d224308d0 XIONG Xiong, DUAN Yu, HU Mingdeng, et al. Reliability research for 640×512 miniaturized IR detector dewar assembly[J]. Infrared Technology, 2022, 44(1): 89-95. http://hwjs.nvir.cn/article/id/0320e799-acda-455d-ad0b-301d224308d0
[22] Philippe C. Sofradir MCT technology for space applications[C]//Pro. of SPIE, 2009, 7330: 1-12.
[23] 叶振华, 李辉豪, 王进东, 等. 红外光电探测器的前沿热点与变革[J]. 红外与毫米波学报, 2022, 41(1): 15-39. YE Zhenhua, LI Huihao, WANG Jindong, et al. Recent hotspots and innovative trends of infrared photon detectors[J]. J. Infrared Millim. Waves, 2022, 41(1): 15-39
-
期刊类型引用(5)
1. 刘鑫,王晶锦,刘庆梅,姜子康,徐兆鹏,李晓英. 大视场长波红外光学系统混合无热化设计. 红外与激光工程. 2025(02): 120-128 .  百度学术
百度学术
2. 吕阳,辛宏伟,康玉思,贺玉坤,陈长征. 红外与可见光双模导引头光学系统设计. 红外技术. 2024(01): 27-30 . 本站查看
3. 张丽芝,陆秋萍,段帆琳,戴幸,乔大勇. 长焦镜头光学系统设计及无热化研究. 光学学报. 2024(08): 227-236 . 百度学术
4. 刘朋朋,靳利锋,赵慧,李妥妥. 低轨道遥感相机光机热一体化分析及优化设计. 红外技术. 2022(06): 614-621 . 本站查看
5. 冯丽军,李训牛,陈洁,周玲玲,董江涛,孙爱平,鲍佳男. 大相对孔径大面阵长波红外光学无热化镜头的设计. 红外技术. 2022(10): 1066-1072 . 本站查看
其他类型引用(2)









计量
- 文章访问数: 107
- HTML全文浏览量: 19
- PDF下载量: 74
- 被引次数: 7
