
Thermal Design and Simulation Verification of High-precision Integrated Star Sensor in Near-Earth Orbit
-
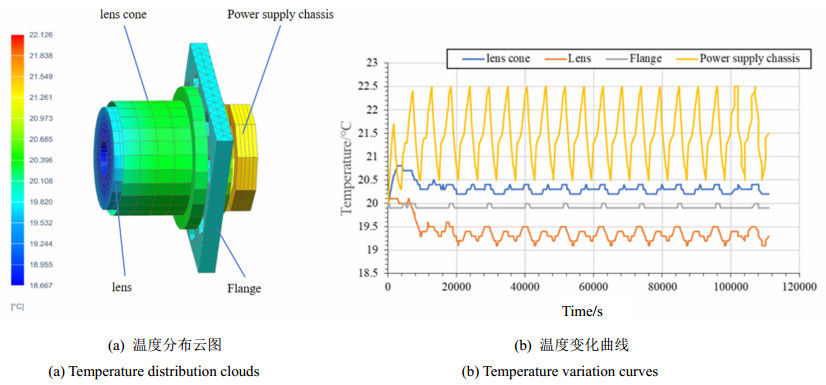
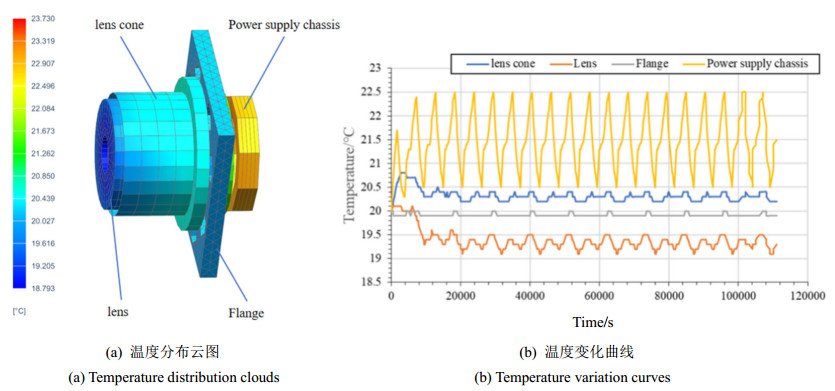
摘要: 某型高精度一体式星敏感器指向精度高,对温度变化非常敏感。其所处近地轨道外热流复杂多变,一体式结构和内热源集中的综合因素不仅导致散热设计困难,而且镜头直接受到内热源发热影响难以保障指向精度。首先,结合轨道参数,安装布局获得星敏感器平均吸收外热流。然后,通过分析外热流与内热源工作情况,采用被动热控和主动热控相结合的热设计方法,并对星敏感器散热面的位置与大小进行设计与计算。最后,根据轨道环境和热控措施并利用热仿真软件进行热分析验证。仿真结果表明,安装法兰温度为19.82℃~20.10℃,镜头轴向温差小于2.23℃,周向温差小于0.48℃,电路盒温度为19.10℃~23.49℃,满足热控指标。通过合理的热控设计保证了极高精度星敏感器的稳定工作条件,星敏感器的热设计合理有效。Abstract: High-precision integrated star sensors have a high pointing accuracy and are highly sensitive to temperature changes. The external heat flow in near-Earth orbits is complex and variable. The comprehensive factors of the integrated structure and the concentration of the internal heat source not only lead to difficulty in the heat dissipation design, but also make it difficult to guarantee the pointing accuracy of the lens directly affected by the internal heat source. First, combined with the orbital parameters, the installation layout provides the average absorbed external heat flux of the star sensor. Subsequently, by analyzing the working conditions of the external and internal heat flows, a thermal design method combining passive and active thermal control is adopted, and the position and size of the heat dissipation surface of the star sensor are designed and calculated. Finally, thermal analysis and verification are performed using thermal simulation software according to the orbital environment and thermal control measures. The simulation results show that the installation flange temperature is 19.82-20.10℃, the axial temperature difference of the lens is less than 2.23℃, the circumferential temperature difference is less than 0.48℃, and the circuit box temperature is 19.10-23.49℃, which meets the thermal control index. The stable working conditions of the extremely high-precision star sensor are ensured by a reasonable thermal control design, and the thermal design of the star sensor is reasonable and effective.
-
Keywords:
- high-precision star sensor /
- thermal design /
- thermal analysis
-
0. 引言
红外搜索跟踪系统利用红外成像原理实现目标被动探测,具备优异的静谧探测能力,被广泛地应用于目标的搜索、定位与跟踪等领域[1-2]。近年来,随着目标形态和运动姿态的多样化,常规的车载雷达和固基平台红外搜索跟踪系统已无法满足应用需求。基于移动平台的红外搜索跟踪系统可以隔离载体运动姿态变化的扰动,在视线坐标系下保持光轴角速度稳定,确保光电探测器在其曝光积分时间内对场景的“凝视”,提高对“低小慢”红外目标的探测性能。因此,基于移动平台的搜跟系统已逐渐成为新一代红外搜跟系统升级与发展的主流趋势。
从工作原理上可知,红外搜索跟踪系统不仅受到来自系统内部的电磁转矩波动、轴承摩擦、动密封摩擦和线缆应力变化等带来的力矩干扰,还受到行进间载体运动姿态变化耦合的随机角速度扰动。内外部扰动都将使光轴在探测器积分时间内产生角运动,进而影响成像质量,降低系统对弱小目标的探测能力[3-5]。在工程实现上,提高红外搜索跟踪系统的视轴稳定性能主要从多框架或多阶执行结构分级隔离扰动的框架结构改进和高精度视线角速度控制两方面入手。其中,增加结构框架或执行机构不利于控制搜索跟踪系统的体积、重量和成本。鉴于移动平台应用的小型化、轻量化要求,本文着重从稳定控制的角度讨论改进视轴稳定性能的方法。
为优化和提高视轴稳定控制性能,研究人员进行了很多的工作。姬伟等升级了单速度环的稳定控制方式,提出采用直流测速机和陀螺反馈实现双速度闭环串级控制的方法,并通过实验证明了双速度闭环控制方法对系统抗扰性、鲁棒性等的改善效果[6];方超宇等设计了含有降阶扩张状态观测器的自抗扰控制器,对扰动总和实时观测并进行线性化前馈补偿,有效提高了两轴四框架稳定平台的扰动隔离性能[7];孔德杰等基于双速度闭环控制结构,分析了高增益提高扰动抑制能力和降低系统稳定性的矛盾,提出引入加速度反馈和引入扰动观测器两种等效方法,在改善系统动态响应性能的同时,有效增强了扰动抑制能力[8];魏伟等从系统受到的扰动入手,融合自抗扰控制和重复控制的方法,有效拓宽了扰动隔离带宽,显著提高了两轴四框架搜索跟踪平台的视轴稳定性能[9];蔡华祥等提出基于扩张状态观测器的扰动补偿控制方法,有效补偿了望远镜稳定平台的非线性扰动影响[10];刘京等利用滑膜控制器和滑膜观测器组成复合控制,有效改善了望远镜伺服系统在复杂扰动环境下的跟踪性能[11];唐涛等将PI-PI(proportion integral-proportion integral)控制器引入到具有输出延迟的快速倾斜镜控制系统中,在不增加系统闭环带宽的前提下,有效提高了CCD闭环的低频闭环增益和低频扰动抑制能力[12];张良总等利用Stewart平台和TTM(tip-tit mirror)倾斜校正系统的双阶闭环控制,解决了空间望远镜稳定平台的隔振和跟踪性能矛盾[13]。但是,这些研究主要基于两轴四框架结构的光电吊舱系统或两轴两框架+快返镜结构的望远镜固基平台开展的。这类系统通过多层框架结构或多阶执行机构的分级隔离,大大降低了内外扰动对视轴稳定性能的影响,因此系统稳定控制的要求相对较低。
两轴两框架光电稳定平台,因其没有分级隔离结构,且转动惯量较小,稳定控制要求相对较高[3, 14]。目前,国外代表性的两框架光电系统主要有美国的Skyball-SA-144/18,视轴稳定精度达到35 μrad[15];国内主要以长光所等的产品为代表,视轴稳定精度达到40 μrad,甚至最新研究表明已实现23.6 μrad的视轴稳定精度[16-17]。但是,这些研究都主要应用于机载光电侦察领域。对于移动平台红外搜索跟踪系统领域,目前相关研究和应用较少。
本文以两轴两框架移动平台红外搜索跟踪系统为对象开展研究,首先从红外搜索跟踪系统稳定控制原理入手,分析现有双速度闭环稳定控制方法存在的不足。然后,针对移动平台红外搜索跟踪系统的应用需求,改进双速度闭环控制结构:前馈电机速度构成双速度闭环同阶串级控制,分开处理系统内部力矩扰动和载体运动姿态变化耦合的角速度扰动,用高带宽的框架速度回路来抑制具有高频特性的内部力矩扰动,用低带宽的稳定回路来抑制载体运动耦合的角速度扰动,并用平方PI控制策略来提高回路的低频增益,从而综合提高反馈回路的抗扰动能力;同时,利用Leunberger扰动观测与前馈扰动解耦的方法来进一步提高系统的抗扰性能。最后,通过数学仿真和实物实验,验证了本文提出的基于平方PI和Leunberger扰动观测前馈的双速度闭环同阶串级控制方法对移动平台红外搜索跟踪系统抗扰动性能的改善作用,得到了较好的视轴稳定效果。
1. 红外搜索跟踪系统的稳定控制实现与分析
红外搜索跟踪系统将红外探测器等光电载荷置于稳定平台内框上,利用稳定平台在方位、俯仰方向上的旋转运动,控制视轴的空间运动,实现光电载荷对目标的搜索、探测、识别、跟踪和定位等功能。系统伺服控制的实质是实现视轴的“静”稳定与“动”跟踪。一方面要隔离扰动,保证视轴惯性空间内的稳定,并以此作为指示基准;另一方面,要不断调整视轴指向以跟随目标姿态的变化[6, 18]。
传统的稳定控制方法,利用陀螺获取光电载荷视轴的角速度姿态,计算光电载荷视轴偏离目标视线的误差,并由此给出控制量调整视轴指向,从而达到稳定视轴基准的目的。
然而,受模型差异、电磁转矩波动、摩擦力矩变化、质心不平衡、载体振动和颠簸等内外部干扰,单一的速度稳定环难以协调各种干扰的影响和相互牵制[6, 19]。另外,单速度闭环稳定精度受限于陀螺器件的精度,且高精度光纤陀螺器件的成本通常都很高。实际工程应用中,红外搜索跟踪系统通常采用如图 1所示的双速度闭环稳定控制模型。
![]() 图 1 双速度闭环稳定控制模型Figure 1. Single-axis double-velocity closed-loop stable control model
图 1 双速度闭环稳定控制模型Figure 1. Single-axis double-velocity closed-loop stable control model图 1中:ωR(s)、ωMR(s)、ωM(s)、ωL(s)分别表示视轴空间速度指令、电机速度指令、电机速度输出和视轴空间速度;W1(s)和W2(s)分别表示内环和外环稳定控制器;Ud(s)表示内部力矩干扰等效的电压量;ωd(s)表示载体运动姿态变化耦合的视轴角速度偏移量;kg和kc分别表示陀螺和编码器标度因子;Pm(s)表示电机及其框架的传递函数;KPWM表示功率放大器的放大系数。
由图 1可得,双速度闭环稳定控制系统视轴空间速度ωL(s)输出的传递函数,如式(1)所示:
$$ \begin{array}{l} {\omega _{\rm{L}}}(s) = \frac{{{W_2}(s){W_1}(s){K_{{\rm{PWM}}}}{P_m}(s)}}{{1 + [{k_{\rm{g}}}{W_2}(s) + {k_{\rm{c}}}]{W_1}(s){K_{{\rm{PWM}}}}{P_m}(s)}}{\omega _{\rm{R}}}(s) \\ \ \ \ \ \ \ \ \ \ \ + \frac{{{P_m}(s)}}{{1 + [{k_{\rm{g}}}{W_2}(s) + {k_{\rm{c}}}]{W_1}(s){K_{{\rm{PWM}}}}{P_m}(s)}}{U_{\rm{d}}}(s) \\ \ \ \ \ \ \ \ \ \ \ + \frac{{1 + {k_{\rm{c}}}{W_1}(s){K_{{\rm{PWM}}}}{P_m}(s)}}{{1 + [{k_{\rm{g}}}{W_2}(s) + {k_{\rm{c}}}]{W_1}(s){K_{{\rm{PWM}}}}{P_m}(s)}}{\omega _{\rm{d}}}(s) \end{array} $$ (1) 利用信噪比指标衡量伺服系统的抗扰性能,信噪比越大,抗扰性能越强[6]。式(1)变形可分别获得双速度闭环下系统对于内部力矩干扰Ud(s)和外部载体运动姿态变化耦合角速度扰动ωd(s)的信噪比,分别如式(2)和式(3)所示。
$$ {A_{{\rm{d1}}}} = \frac{{{\omega _{\rm{L}}}(s)/{\omega _{\rm{R}}}(s)}}{{{\omega _{\rm{L}}}(s)/{U_{\rm{d}}}(s)}} = {W_2}(s){W_1}(s){K_{{\rm{PWM}}}} $$ (2) $$ {A_{{\rm{d2}}}} = \frac{{{\omega _{\rm{L}}}(s)/{\omega _{\rm{R}}}(s)}}{{{\omega _{\rm{L}}}(s)/{\omega _{\rm{d}}}(s)}} = \frac{{{W_2}(s){W_1}(s){K_{{\rm{PWM}}}}{P_{\rm{m}}}(s)}}{{1 + {k_{\rm{c}}}{W_1}(s){K_{{\rm{PWM}}}}{P_{\rm{m}}}(s)}} $$ (3) 对于固基平台或者多轴多框架的红外搜索跟踪系统,图 1所示的双速度闭环控制已经能使系统获得很好的视轴稳定性能。相比较下,两轴两框架移动平台红外搜索跟踪系统转动惯量较小,动密封带来的可变摩擦力矩干扰和行进间载体运动姿态变化耦合的角速度波动直接作用在视轴上,其稳定控制的挑战更加严峻。特别是行进间载体运动姿态的突然变化,耦合到视轴的阶跃角速度扰动容易在低速跟踪时引起控制震荡,降低视轴控制的稳定性。与此同时,陀螺器件精度与体积大小、成本等的矛盾严重制约着移动平台红外搜索跟踪系统在边防、海防和城市治安、森林监控等民用领域的推广[20]。
为此,本文改进现有双速度闭环稳定控制方法,使其不受限于框架组成和陀螺精度,能够快速补偿行进间载体运动姿态变化耦合的角速度扰动,使移动平台红外搜索跟踪系统获得更高的视轴稳定精度。
2. 基于移动平台红外搜索跟踪系统的稳定控制方法研究
2.1 双速度闭环同阶串级控制结构的设计
图 1所示控制模型中,陀螺稳定外环的输出直接作为电机速度内环的指令。根据串级控制降阶特性,内环带宽需远远大于外环,才能保证控制的稳定性。在移动平台红外搜跟系统机动过程中,为克服载体运动姿态变化耦合的阶跃角速度干扰,外环控制输出指令将会在内环引入指令阶跃输入和控制连续输出的矛盾,严重影响控制系统的稳定性能。
为此,本文提出前馈电机速度构成双速度闭环同阶串级控制的改进方法。如图 2所示,电机速度前馈量与陀螺速度外环的输出调整量相叠加,作为电机速度内环的指令。kf表示上一帧速度前馈的比例系数。另外,在前馈通路上引入带宽匹配滤波环节,以匹配内外速度环带宽。
![]() 图 2 双速度闭环同阶串级控制数学模型Figure 2. Double-velocity closed-loop same order cascade control mathematical model
图 2 双速度闭环同阶串级控制数学模型Figure 2. Double-velocity closed-loop same order cascade control mathematical model由此,计算得到双速度闭环同阶串级控制系统的传递函数,如式(4)所示。
$$ \begin{array}{l} {\omega _{\rm{L}}}(s) = \frac{{{W_2}(s){W_1}(s){K_{{\rm{PWM}}}}{P_{\rm{m}}}(s)}}{{1 + [{k_{\rm{g}}}{W_2}(s) + ({k_{\rm{c}}} - {k_{\rm{f}}})]{W_1}(s){K_{{\rm{PWM}}}}{P_{\rm{m}}}(s)}}{\omega _{\rm{R}}}(s) \\ \ \ \ \ \ \ \ \ \ + \frac{{{P_m}(s)}}{{1 + [{k_{\rm{g}}}{W_2}(s) + ({k_{\rm{c}}} - {k_{\rm{f}}})]{W_1}(s){K_{{\rm{PWM}}}}{P_{\rm{m}}}(s)}}{U_{\rm{d}}}(s) \\ \ \ \ \ \ \ \ \ \ + \frac{{1 + ({k_{\rm{c}}} - {k_{\rm{f}}}){W_1}(s){K_{{\rm{PWM}}}}{P_{\rm{m}}}(s)}}{{1 + [{k_{\rm{g}}}{W_2}(s) + ({k_{\rm{c}}} - {k_{\rm{f}}})]{W_1}(s){K_{{\rm{PWM}}}}{P_{\rm{m}}}(s)}}{\omega _{\rm{d}}}(s) \end{array} $$ (4) 对于内部力矩干扰Ud(s)和外部载体角速度扰动ωd(s)的信噪比,分别如式(5)和式(6)所示:
$$ {A_{{\rm{d1}}}}_{\_1} = \frac{{{\omega _{\rm{L}}}(s)/{\omega _{\rm{R}}}(s)}}{{{\omega _{\rm{L}}}(s)/{U_{\rm{d}}}(s)}} = {W_2}(s){W_1}(s){K_{_{{\rm{PWM}}}}} $$ (5) $$ \begin{array}{l} {A_{{\rm{d2}}\_1}} = \frac{{{\omega _{\rm{L}}}(s)/{\omega _{\rm{R}}}(s)}}{{{\omega _{\rm{L}}}(s)/{\omega _{\rm{d}}}(s)}} = \hfill \\ \quad \frac{{{W_2}(s){W_1}(s){K_{{\rm{PWM}}}}{P_{\rm{m}}}(s)}}{{1 + ({k_{\rm{c}}} - {k_{\rm{f}}}){W_1}(s){K_{{\rm{PWM}}}}{P_{\rm{m}}}(s)}}\quad \quad \hfill \end{array} $$ (6) 分别比较式(2)、式(5)和式(3)、式(6),可得:
$$ \left\{ {\begin{array}{*{20}{c}} {\Delta {A_{{\text{d1}}}} = \frac{{{A_{{\rm{d1}} - 1}}}}{{{A_{{\rm{d1}}}}}} = 1} \\ {\Delta {A_{{\rm{d2}}}} = \frac{{{A_{{\rm{d2}}\_1}}}}{{{A_{{\rm{d2}}}}}} = \frac{{1 + {k_{\rm{c}}}{W_1}(s){K_{{\rm{PWM}}}}{P_{\rm{m}}}(s)}}{{1 + ({k_{\rm{c}}} - {k_{\rm{f}}}){W_1}(s){K_{{\rm{PWM}}}}{P_{\rm{m}}}(s)}}} \end{array}} \right. $$ (7) 若控制器设计时,在工作带宽范围内满足式(8)所示的简化条件:
$$ \left\{ {\begin{array}{*{20}{c}} {\left| {1 + {k_{\rm{c}}}{W_1}(s){K_{{\rm{PWM}}}}{P_{\rm{m}}}(s)} \right| \gg 1} \\ {\left| {1 + ({k_{\rm{c}}} - {k_{\rm{f}}}){W_1}(s){K_{{\rm{PWM}}}}{P_{\rm{m}}}(s)} \right| \gg 1} \end{array}} \right. $$ (8) 则,式(7)简化为:
$$ \left\{ {\begin{array}{*{20}{c}} {\Delta {A_{{\text{d1}}}} = \frac{{{A_{{\rm{d1}} - 1}}}}{{{A_{{\rm{d1}}}}}} = 1} \\ {\Delta {A_{{\rm{d2}}}} = \frac{{{A_{{\rm{d2}}\_1}}}}{{{A_{{\rm{d2}}}}}} \approx \frac{{{k_{\rm{c}}}}}{{{k_{\rm{c}}} - {k_{\rm{f}}}}}} \end{array}} \right. $$ (9) 式(9)表明,前馈电机速度构成双速度闭环同阶串级控制的方法,在保持双速度闭环串级控制对内部力矩扰动抑制能力的基础上,增大了对行进间载体运动姿态变化耦合的角速度扰动的抑制能力。
2.2 平方PI控制策略的分析与实现
扰动响应和指令响应都可以增大回路增益来加以改善[21]。考虑到移动平台红外搜索跟踪系统的扰动响应更多关注载体运动姿态变化耦合的角速度扰动,本文基于图 2双速度闭环同阶串级控制结构,提出陀螺速度外环采用平方PI的控制策略,在系统机械谐振频率不变的情况下,增大陀螺速度外环低频段的开环增益和斜率,进而提高稳定平台对载体运动姿态变化耦合的角速度扰动的隔离能力,如图 3所示。
![]() 图 3 基于平方PI控制的双速度闭环同阶串级控制模型Figure 3. Double-velocity closed-loop same order cascade control model based on square PI controller
图 3 基于平方PI控制的双速度闭环同阶串级控制模型Figure 3. Double-velocity closed-loop same order cascade control model based on square PI controller单PI控制器和平方PI控制器的传递函数如式(10)所示[21]:
$$\left\{\begin{array}{c} W_{\mathrm{PI}}(s)=k_{\mathrm{p}}\left(1+W_{\mathrm{i}} \frac{1}{s}\right) \\ W_{\mathrm{PI}-\mathrm{PI}}(s)=k_{\mathrm{p}}\left(1+W_{\mathrm{i}} \frac{1}{s}\right)^2 \end{array}\right.$$ (10) 由图 4所示的定性Bode图可知,在控制参数kp和Wi相同的情况下,平方PI控制器在低频段具有很高的开环增益。在工作频率远远小于转折频率时,两类控制器开环传递函数可如式(11)简化。可知,平方PI控制器将低频段的开环幅频增益近似增大Wi倍。
$$ \left\{ {\begin{array}{*{20}{c}} {{W_{{\rm{PI}}}}(s) = {k_{\rm{p}}}{W_{\rm{i}}}} \\ {{W_{{\rm{PI}}\_{\rm{PI}}}}(s) = {k_{\rm{p}}}{W_{\rm{i}}}^2} \end{array}} \right.(w \ll {W_{\rm{i}}}) $$ (11) ![]() 图 4 单PI控制和平方PI控制的定性Bode图Figure 4. Qualitative Bode plots for single PI and square PI control
图 4 单PI控制和平方PI控制的定性Bode图Figure 4. Qualitative Bode plots for single PI and square PI control一般情况下,载体运动姿态变化耦合的角速度扰动为频率小于5 Hz的低频扰动。因此,陀螺速度外环采用平方PI的控制策略,能够有效提高移动平台红外搜索跟踪系统对行进间载体运动姿态变化耦合的角速度扰动的隔离能力,获得良好的视轴稳定精度。
2.3 基于Leunberger的扰动观测与前馈解耦
由2.2节分析可知,平方PI控制策略大大提高了低频段的开环增益和斜率。但是,根据经典控制理论频域响应分析可知:积分控制器的增加,将减小相位裕度,降低伺服系统的稳定性能。本文利用Luenberger扰动观测器观测红外搜索跟踪系统行进间受到的载体运动姿态变化扰动,并将估计得到的扰动电压等效值前馈至功率驱动器前端直接输出,削弱平方PI控制引入的相位滞后影响。
平方PI校正的Luenberger扰动观测器控制框图如图 5所示。其中,陀螺速度模型采用式(12)所示的低通滤波器表示,陀螺带宽对应为滤波器截止频率ω0。
$$ W(s) = \frac{{{\omega _0}}}{{{s^2} + 2\xi {\omega _0}s + \omega _0^2}} $$ (12) ![]() 图 5 平方PI校正的Luenberger扰动观测器控制框图Figure 5. Control block diagram of Luenberger disturbance observation with square PI corrector
图 5 平方PI校正的Luenberger扰动观测器控制框图Figure 5. Control block diagram of Luenberger disturbance observation with square PI corrector另外,扰动观测器采用平方PI校正策略,提高陀螺速度外环的控制带宽,替代在电机速度前馈时引入的带宽匹配滤波模块,使稳定控制算法更简化和更具操作性。
最终,基于移动平台红外搜索跟踪系统的应用,本文在双速度闭环稳定控制的基础上做出改进,设计了基于平方PI和Luenberger扰动观测前馈的双速度闭环同阶串级控制的视轴稳定方法,控制框图如图 6所示。
![]() 图 6 本文设计的视轴稳定控制原理框图Figure 6. The optical axis stability control block diagram of our design
图 6 本文设计的视轴稳定控制原理框图Figure 6. The optical axis stability control block diagram of our design3. 实验与结果分析
3.1 数学仿真分析
基于MATLAB仿真平台,搭建某两轴两框架红外搜索跟踪系统俯仰框架稳定控制的数学仿真模型,对比传统单速度闭环、传统双速度闭环和本文设计的视轴稳定方法的性能。
基本电气参数如表 1所列,单PI控制器和双PI控制器传递函数如式(10)所示。单速度闭环控制参数为kp=70,Wi=60;双速度闭环和本文改进的双速度闭环同阶串级控制中,电机框架速度内环控制参数为kp=75,Wi=30;陀螺速度外环控制参数为,kp=1.3,Wi=70。
表 1 俯仰框架基本电气参数Table 1. Basic electrical parameters of pitching frameParameters Value Unit Moment of inertia 0.014 kg⋅m2 Armature resistance 14 Ω Armature inductance 7.5 mH Back-emf coefficient 0.28 V/rad/s Moment coefficient 0.28 Nm/A Gyro filter frequency 50 Hz 3.1.1 双速度闭环同阶串级控制结构的扰动响应分析
对比了传统双速度闭环和本文双速度闭环同阶串级控制两种视轴稳定方法的抗扰动性能,扰动响应曲线如图 7所示。
![]() 图 7 两种稳定控制方法的扰动响应曲线Figure 7. Disturbance response curves of two stability control methods
图 7 两种稳定控制方法的扰动响应曲线Figure 7. Disturbance response curves of two stability control methods分析图 7可知,相对于传统双速度闭环控制,本文设计的双速度闭环同阶串级控制的视轴稳定方法在低频段具有更好的扰动抑制能力。其扰动响应低频段的增益最大降低约23.5 dB,且出现明显的相位滞后。由此,验证了2.1节和式(9)分析的正确性。
3.1.2 平方PI控制分析
首先对比了单PI控制和平方PI控制的开环频率响应特性,其次在双闭环同阶串级控制结构的基础上,对比陀螺速度外环采用单PI控制器和平方PI控制器后的视轴稳定性能。
图 8为单PI控制和平方PI控制的开环频率响应曲线。可以看出:相比单PI控制方法,平方PI控制在不改变转折频率的情况下,提升约2倍的低频段的开环增益;但是,平方PI控制引入了很大的相位滞后,最大将引起90°的相位滞后,严重降低整个控制系统的相位裕度。
![]() 图 8 单PI控制和平方PI控制的开环频率响应曲线Figure 8. Open-loop frequency response curves of single PI and square PI controller
图 8 单PI控制和平方PI控制的开环频率响应曲线Figure 8. Open-loop frequency response curves of single PI and square PI controller图 9和图 10分别表示在双闭环同阶串级控制结构基础上,1°/1 Hz和1°/2 Hz扰动下单PI和平方PI陀螺外环控制的视轴稳定响应曲线。对比可知,相对于单PI的陀螺外环控制,平方PI的陀螺外环控制有效改善了位置和速度的最大偏移量、稳定精度及稳定快速性能:
![]() 图 9 1°/1 Hz扰动下基于改进控制结构和不同陀螺外环控制的视轴稳定曲线Figure 9. Optical axis stability curves with 1°/1 Hz disturbance based on improved structure and different gyro outer-loop controller
图 9 1°/1 Hz扰动下基于改进控制结构和不同陀螺外环控制的视轴稳定曲线Figure 9. Optical axis stability curves with 1°/1 Hz disturbance based on improved structure and different gyro outer-loop controller![]() 图 10 1°/2 Hz扰动下基于改进控制结构和不同陀螺外环控制的视轴稳定曲线Figure 10. Optical axis stability curves with 1°/2 Hz disturbance based on improved structure and different gyro outer-loop controller
图 10 1°/2 Hz扰动下基于改进控制结构和不同陀螺外环控制的视轴稳定曲线Figure 10. Optical axis stability curves with 1°/2 Hz disturbance based on improved structure and different gyro outer-loop controller1)1°/1 Hz扰动下,位置最大偏移量为58.49 μrad,降低23.45 μrad;位置稳定精度为3.744 μrad,提升26.556 μrad,稳定时间缩短230 ms(图 9(a));速度稳定精度为0.009572 mrad/s,提升0.097628 mrad/s,稳定时间缩短212 ms(图 9(b))。
2)1°/2 Hz扰动下,位置最大偏移量为232.3 μrad,降低88.8 μrad;位置稳定精度为53.68 μrad,提升169.62 μrad,稳定时间缩短104 ms(图 10(a));速度稳定精度为0.2801 mrad/s,提升1.3109 mrad/s,稳定时间缩短113 ms(图 10(b))。
3.1.3 扰动观测前馈分析
在平方PI控制的双速度闭环同阶串级控制系统基础上,首先对比加入Luenberger扰动观测前馈对视轴稳定性能的影响,其次对比观测校正器采用平方PI控制的改进效果。
单PI校正器和平方PI校正器传递函数如式(10)所示,控制参数为kp=1.25,Wi=70。图 11表示Luenberger扰动观测前馈加入前后不同扰动下的视轴稳定响应曲线。
![]() 图 11 Luenberger扰动观测前馈加入前后不同扰动下的视轴稳定曲线Figure 11. Optical axis stability curves with different disturbance before and after the feedforward of Luenberger disturbance observation
图 11 Luenberger扰动观测前馈加入前后不同扰动下的视轴稳定曲线Figure 11. Optical axis stability curves with different disturbance before and after the feedforward of Luenberger disturbance observation可以看出:
1)1°/1 Hz扰动时,Luenberger扰动观测前馈的引入,位置最大偏移量为21.55 μrad,减少14.27 μrad,稳定精度为0.358 μrad,提升0.894 μrad,相位超前约90°(图 11(a));
2)1°/2 Hz扰动时,Luenberger扰动观测前馈的引入,位置最大偏移量为85.97 μrad,减少56.83 μrad,稳定精度为5.103 μrad,提升13.737 μrad,相位超前约90°(图 11(b))。
图 12和图 13分别表示单PI校正和平方PI校正的1°/1 Hz和1°/2 Hz扰动响应曲线。平方PI校正方法的使用更进一步改善了视轴稳定控制的最大偏移量、稳定精度和控制系统相位裕度。
![]() 图 12 单PI校正和平方PI校正的1°/1 Hz扰动响应曲线Figure 12. Disturbance response curves with 1°/1 Hz disturbance for single PI and square PI corrector
图 12 单PI校正和平方PI校正的1°/1 Hz扰动响应曲线Figure 12. Disturbance response curves with 1°/1 Hz disturbance for single PI and square PI corrector![]() 图 13 单PI校正和平方PI校正的1°/2 Hz扰动响应曲线Figure 13. Disturbance response curves with 1°/2 Hz disturbance for single PI and square PI correction
图 13 单PI校正和平方PI校正的1°/2 Hz扰动响应曲线Figure 13. Disturbance response curves with 1°/2 Hz disturbance for single PI and square PI correction最终,Luenberger扰动观测前馈和平方PI校正环节的引入,进一步改善了视轴稳定精度。相比较未使用观测器的稳定性能,1°/1 Hz扰动下,视轴最大偏移量降低15.24 μrad,稳定精度提升0.9623 μrad;12 Hz扰动下,视轴最大偏移量降低61.74 μrad,稳定精度提升15.481 μrad。
3.2 算法改进的有效性分析
表 2和图 14分别表示了不同算法作用的视轴稳定精度和扰动幅频响应曲线。
表 2 不同算法作用的视轴稳定精度Table 2. Optical axis stability accuracy for different algorithmsμrad Disturbance Traditional double-closed loop Improved double-closed loop Singer PI Square PI Square PI+DOB_PI Square PI+DOB_PI-PI 1°/1 Hz 1168 30.3 3.744 2.85 2.7817 1°/2 Hz 2161 223.3 53.68 39.943 38.199 ![]() 图 14 不同算法的扰动响应幅频曲线Figure 14. Magnitude-frequency curves of disturbance response of different algorithms
图 14 不同算法的扰动响应幅频曲线Figure 14. Magnitude-frequency curves of disturbance response of different algorithms分析可知,本文通过双速度闭环同阶串级的改进、陀螺外环平方PI控制、Luenberger扰动观测前馈和平方PI校正等步骤,逐步提升了两轴两框架红外搜索跟踪系统的视轴稳定精度。1°/1 Hz扰动下,稳定精度达到2.7817 μrad,扰动抑制性能提升73.293 dB;1°/2 Hz扰动下,稳定精度达到38.199 μrad,扰动抑制性能提升56.338 dB。因此,本文稳定控制方法改进有效,两轴两框架红外搜索跟踪系统的视轴稳定精度达到国内外先进水平。
图 15和图 16分别表示了本文稳定控制算法在不同角速度扰动下的稳定性能和基于100 μrad稳定精度要求的扰动容限。分析可知,本文稳定控制算法具备很高带宽的扰动抑制能力。1°小幅值角速度扰动,本算法能最大有效抑制4.5 Hz带宽的扰动影响。
![]() 图 15 本文稳定控制算法在不同角速度扰动下的稳定性能Figure 15. Stability with different velocity disturbance based on the stability control method proposed in this paper
图 15 本文稳定控制算法在不同角速度扰动下的稳定性能Figure 15. Stability with different velocity disturbance based on the stability control method proposed in this paper![]() 图 16 本文稳定控制算法基于100 μrad稳定精度的扰动容限Figure 16. Disturbance tolerance for 100 μrad stability accuracy based on the stability control method proposed in this paper
图 16 本文稳定控制算法基于100 μrad稳定精度的扰动容限Figure 16. Disturbance tolerance for 100 μrad stability accuracy based on the stability control method proposed in this paper3.3 实验验证与结果分析
利用六自由度摇摆台模拟移动平台红外搜索跟踪系统行进间受到的载体运动姿态变化扰动,搭建如图 17所示的实验平台,验证某两轴两框架移动平台红外搜索跟踪系统的视轴稳定效果。
![]() 图 17 基于六自由度摇摆台的移动平台红外搜索系统视轴稳定实验平台Figure 17. The optical-axis-stability experimental platform of mobile platform infrared search and track system based on six-degree-of-freedom swing platform
图 17 基于六自由度摇摆台的移动平台红外搜索系统视轴稳定实验平台Figure 17. The optical-axis-stability experimental platform of mobile platform infrared search and track system based on six-degree-of-freedom swing platform俯仰框架视轴稳定结果如图 18和图 19所示,具体数据如表 3所列。对比可知:相比较传统单PI控制单陀螺速度闭环的稳定控制方法,本文设计的稳定方法在1°/1 Hz载体运动扰动下,视轴稳定精度提升62.63 μrad(63.60%);在1°/2 Hz载体运动扰动下,稳定精度提升275.3 μrad(69.80%)。
![]() 图 18 1°/1 Hz载体运动扰动下的视轴稳定效果Figure 18. Optical axis stability with 1°/1 Hz carrier's disturbance
图 18 1°/1 Hz载体运动扰动下的视轴稳定效果Figure 18. Optical axis stability with 1°/1 Hz carrier's disturbance![]() 图 19 1°/2 Hz载体运动扰动下的视轴稳定效果Figure 19. Optical axis stability with 1°/2 Hz carrier's disturbance表 3 摇摆台不同扰动条件下俯仰框架的视轴稳定精度Table 3. Pitch-optical-axis stability accuracy with different disturbance of swing platform
图 19 1°/2 Hz载体运动扰动下的视轴稳定效果Figure 19. Optical axis stability with 1°/2 Hz carrier's disturbance表 3 摇摆台不同扰动条件下俯仰框架的视轴稳定精度Table 3. Pitch-optical-axis stability accuracy with different disturbance of swing platformDisturbance Single closed-loop/μrad Our method/μrad Decreasing percentage/% 1°/1 Hz 98.48 35.85 63.60 1°/2 Hz 394.4 119.1 69.80 实验结果表明:本文稳定控制方法的应用,使该移动平台红外搜索跟踪系统有效地克服了载体运动姿态变化对光电载荷视轴的扰动影响,周扫搜索过程中图像清晰不拖尾,目标跟踪过程中目标视场中心位置稳定不晃动,获得了高精度的视轴稳定效果。
表 4比较了基于本文稳定控制方法的移动平台红外搜跟系统和国内外代表性两轴两框架光电吊舱的稳定精度。分析可知,1°/1 Hz扰动下,基于本文稳定控制方法的两轴两框架移动平台红外搜跟系统实现35.85 μrad的视轴稳定精度,已达到国内外先进水平。
表 4 与部分代表性光电系统的稳定精度对比Table 4. Comparison of stability accuracy with some representative optic-electric systems但是,1°/2 Hz扰动下视轴稳定精度为119.1 μrad。同时,对比表 2和表 3数据可知,虽然视轴稳定精度的改善趋势相同,但数学仿真和实验还存在一定差异。因此,为增强移动平台红外搜跟系统在复杂应用场景下的视轴稳定精度和性能可靠性,还需通过优化对绕线阻力矩、非线性摩擦力矩等的估计来提高系统建模精度,进一步改善基于本文稳定控制方法的移动平台红外搜跟系统视轴稳定精度。
4. 结论
本文针对两轴两框架移动平台红外搜索跟踪系统的光电载荷视轴稳定控制,提出了基于平方PI和Luenberger扰动观测前馈的双速度闭环同阶串级控制方法。仿真和实验表明,相对于传统的单陀螺闭环和双速度闭环稳定控制方法,该稳定控制方法有效提升了移动平台红外搜索跟踪系统在载体运动低频扰动下的视轴稳定精度。1°/1 Hz运动载体扰动下,仿真稳定精度达到2.7817 μrad,实际实验稳定精度达到35.85 μrad。1°/2 Hz运动载体扰动下,仿真视轴稳定精度达到38.199 μrad,实际实验稳定精度达到119.1 μrad。由此,两轴两框架移动平台红外搜索跟踪系统有效克服了行进间载体运动姿态变化耦合的角速度扰动,实现了高平稳高动态的光电载荷视轴指向控制性能。
-
![]()
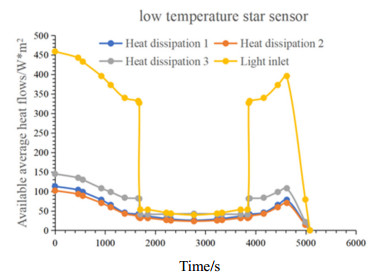
图 11 低温工况温度分布云图与温度变化曲线
Figure 11. Low temperature distribution clouds and temperature variation curves
![]()
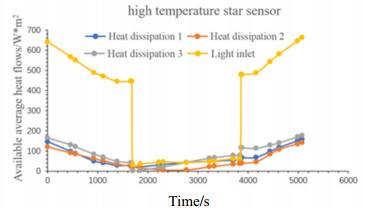
图 12 高温工况温度分布云图与温度变化曲线
Figure 12. High temperature distribution clouds and temperature variation curves
表 1 重要结构热控指标
Table 1 Important structure thermal control index
Structure Index content Thermal control index Installation flange Temperature 20℃±0.5℃ Lens cone Axial temperature difference <3℃ Circumferential temperature difference <1℃ Power supply chassis Temperature <25℃  下载: 导出CSV
下载: 导出CSV
表 2 极端工况
Table 2 Extreme conditions
Solar position β Heat sink surface coating surface properties High temperature
working conditionWinter
solstice60° End period Low temperature
working conditionSummer
solstice0° Initial period
下载: 导出CSV
-
[1] 吕建伟, 王领华, 苏生, 等. 微型星敏热控设计及仿真[J]. 红外与激光工程, 2022, 51(11): 265-270. https://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ202211025.htm LV Jianwei, WANG Linghua, SU Sheng, et al. Thermal control design and simulation of micro star sensor[J]. Infrared and Laser Engineering, 2022, 51(11): 265-270 https://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ202211025.htm
[2] 余成武, 隋杰, 陈超, 等. 高分七号卫星多探头甚高精度星敏感器热设计与验证[J]. 航天器工程, 2020, 29(3): 144-150. https://www.cnki.com.cn/Article/CJFDTOTAL-HTGC202003024.htm YU C W, SUN J, CHEN C, et al. Thermal design and verification of multi-head very high accuracy star sensor onboard GF-7 satellite[J]. Spacecr Eng., 2020, 29(3): 144-150. https://www.cnki.com.cn/Article/CJFDTOTAL-HTGC202003024.htm
[3] 江帆, 王忠素, 陈立恒, 等. 星敏感器组件的热设计[J]. 红外与激光工程, 2014, 43(11): 3740-3745. https://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201411041.htm JIANG FAN, WANG Zhongsu, CHEN Liheng, et al. Thermal design of star sensor assembly[J]. Infrared and Laser Engineering, 2014, 43(11): 3740-3745. https://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201411041.htm
[4] 江帆, 吴清文, 王忠素, 等. 星敏感器支架的结构/热稳定性分析及验证[J]. 红外与激光工程, 2015, 44(11): 6. https://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201511049.htm JIANG Fan, WU Qingwen, WANG Zhongsu., et al. Analysis and verification of structure stability and thermal stability of a bracket of star sensors[J]. Infrared and Laser Engineering, 2015, 44(11): 6. https://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201511049.htm
[5] 张彧, 赵吉喆, 张翔, 等. 环月轨道一体式星敏感器热设计及仿真验证[J]. 航天器环境工程, 2016, 33(5): 516-520. https://www.cnki.com.cn/Article/CJFDTOTAL-HTHJ201605011.htm ZHANG Yu, ZHAO Jizhe, ZHANG Xiang, et al. Thermal design of an integrated star sensor on lunar orbit with simulation validation[J]. Spacecraft Environment Engineering, 2016, 33(5): 516-520. https://www.cnki.com.cn/Article/CJFDTOTAL-HTHJ201605011.htm
[6] 訾克明, 吴清文, 李泽学, 等. 空间光学遥感器的热设计实例及其仿真分析[J]. 计算机仿真, 2008, 25(12): 4. DOI: CNKI:SUN:JSJZ.0.2008-12-023. ZI K M, WU Q W, LI Z X. Simulation analysis of a space optical remote-sensor's thermal design[J]. Computer Simulation, 2008, 25(12): 4. DOI: CNKI:SUN:JSJZ.0.2008-12-023.
[7] 苗建印. 航天器热控制技术[M]. 北京: 北京理工大学出版社有限责任公司, 2018. MIAO J Y. Spacecraft Thermal Control Technology[M]. Beijing: Beijing Institute of Technology Press, 2018.
[8] 李强, 陈立恒. 复杂外热流条件下红外探测器组件热设计[J]. 红外与激光工程, 2016, 45(9): 73-79. https://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201609011.htm LI Qiang, CHEN Liheng. Thermal design of infrared detector components in complex heat flux[J]. Infrared and Laser Engineering, 2016, 45(9): 73-79. https://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201609011.htm
[9] 董奎辰, 郭亮, 黄美娇, 等. 空间相机大功率热源散热设计[J]. 红外技术, 2023, 45(5): 521-526. http://hwjs.nvir.cn/article/id/f7193fd5-4039-46a6-b862-00a13bc28417 DONG Kuichen, GUO Liang, HUANG Meijiao, et al. Heat-dissipation design for space camera high-power heat source[J]. Infrared Technology, 2023, 45(5): 521-526. http://hwjs.nvir.cn/article/id/f7193fd5-4039-46a6-b862-00a13bc28417



















计量
- 文章访问数: 98
- HTML全文浏览量: 32
- PDF下载量: 38
