
Infrared Image Recognition Method for Power Equipment Based on Improved YOLO v5
-
摘要:
为解决电力设备红外图像有遮挡、分类不准确和特征提取不充分等问题,本文提出一种改进的YOLO v5识别方法。首先通过迁移学习的方法,将电力设备可见光图像和红外图像相融合,接着将Triplet注意力机制嵌入到特征提取网络中,对关键特征信息进行加权强化,最后通过多尺度融合的方法实现不同目标的识别。研究结果表明:相对于Faster R-CNN和SSD,本文方法的识别精度和识别效率最高,且适应于复杂背景下的多类型电力设备识别;本文方法的模型仅4.1 MB,相较于SSD缩减了80.8%,实现了网络模型的轻量化。本文方法为电力设备红外图像智能检测提供了新颖可行的方案。
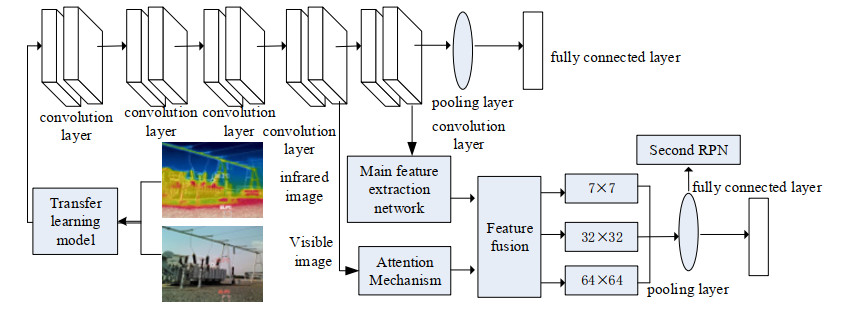
Abstract:This study proposes an improved YOLO v5 method to solve the problems of inaccurate classification and insufficient feature extraction from power equipment infrared images. First, the visible light data and infrared images of the power equipment were fused using the transfer learning method. The triplet attention mechanism was then embedded into the feature extraction network for weighted intensification of key feature information. Finally, different targets were identified using multiscale fusion. The results show that compared with faster R-CNN and SSD, the proposed method has higher recognition accuracy and efficiency and is suitable for image recognition of multi-type power equipment in complex backgrounds. This method realizes a lightweight network model with a size of only 4.1 MB, which is a reduction of 80.8% compared to that of SSD, providing a novel and feasible scheme for intelligent infrared image detection of power equipment.
-
Keywords:
- power equipment /
- infrared image /
- ttransfer learning /
- YOLO v5s /
- attention mechanism /
- light-weight model
-
0. 引言
框架式稳定平台系统近年来发展迅速,广泛应用于飞行器上的目标探测系统、精确制导武器的导引系统等。三自由度框架式红外稳定平台实现惯性空间稳定和对目标跟踪的同时,还可以直接测量制导系统所需的视线角速度信息[1]。三自由度稳定平台在结构上由3个单轴运动框架复合而成,机械装配中产生的装调误差造成框架轴系偏差[2-3]、红外探测器位姿偏差以及陀螺敏感轴的交叉耦合[4-5],使得基座角运动的耦合更加复杂[6],对测量视线角速度带来不利的影响。
文献[7]研究了仅陀螺敏感轴交叉耦合情况下视线角速度的计算。所得结果是在框架轴系正交的假设下得到的。而实际系统中框架的装配必然会存在一定装调误差。本文系统研究了框架、陀螺和红外探测器均存在装调误差时,三自由度框架式红外视线角速度的计算方法,建立基于三轴稳定平台的轴系偏差的数学模型,分析了装调误差对视线角速度计算的影响,并进行仿真验证。
1. 稳定平台系统
三自由度框架式红外稳定平台系统的示意图如图 1。图中,O-XbYbZb表示载体坐标系。载体坐标系的原点取为稳定平台回转中心且坐标系和载体固连。
框架式红外稳定平台系统一般将探测成像系统和速率陀螺安装在稳定平台上,稳定平台固定在内环框架上,成为内环框架的负载。内环框架和稳定平台组成内环本体组合,通过内环框架转轴固定在中环框架上,成为中环框架的负载。中环框架和内环本体组合通过中环框架转轴固定在外环框架上,成为外环框架的负载。外环框架转轴架固定在红外稳定平台的载体上。外环框架相对载体可以做滚转运动;外环框架处于零位时,中环框架相对载体可以做偏航运动;外环框架和中环框架处于零位时,内环框架相对载体可以做俯仰运动。通过内环、中环、外环3个框架的运动合成,可以实现稳定平台在惯性空间中绕回转中心转动。
2. 轴系偏差建模
针对三自由度红外稳定平台的结构特点,除了前面定义的载体坐标系O-XbYbZb,再建立外环坐标系O-XoYoZo、中环坐标系O-XmYmZm、平台坐标系O-XpYpZp和探测坐标系O-XdYdZd。这4个坐标系原点均为稳定平台回转中心,其中,外环坐标系X轴和外环框架转轴固连;中环坐标系Y轴与中环框架转轴固连;平台坐标系Z轴和内环框架转轴固连;探测坐标系和探测器光敏面固连,其X轴对应光敏面的中垂线(即探测成像系统光轴),Y轴和Z轴分别对应探测器光敏面的行和列。
在设计的理想状态下,探测成像系统光轴与内环框架转轴、内环框架转轴与中环框架转轴、中环框架转轴与外环框架转轴应分别正交,而外环框架转轴和载体纵轴完全重合。探测坐标系和平台坐标系重合且各框架处于零位时,4个坐标系和载体坐标系重合。记外环框架角为φw,中环框架角为φz,内环框架角为φn,角度正负按右手规则确定,那么各坐标系相互间的变换关系如图 2所示。
实际装配时,框架轴系不可能做到零误差。本文描述轴系装调误差的参数为α1、β1、α2、β2、α3、β3、α4、β4和γ4。其中,α1为外环框架转轴在载体坐标系XOZ面的投影与载体系X轴的夹角;β1为外环框架转轴与载体系XOZ面的夹角;α2为中环框架转轴在外环坐标系YOZ面的投影与外环系Y轴的夹角;β2为中环框架转轴与载体系YOZ面的夹角;α3为内环框架转轴在中环坐标系XOZ面的投影与中环系Z轴的夹角;β3为内环框架转轴与中环系β3面的夹角;α4为探测器光敏面中垂线在平台系XOZ面的投影与平台系X轴的夹角;β4为光敏面中垂线与平台系XOZ面的夹角;γ4和α4、β4一起构成一组平台系到探测系的欧拉角。角度正负号按右手规则确定。当这些装调误差存在时,各坐标系相互间的变换关系如图 3所示。
![]() 图 3 框架轴系偏差时各坐标系之间的变换关系Figure 3. Transformation of coordinate systems with axis system deviation
图 3 框架轴系偏差时各坐标系之间的变换关系Figure 3. Transformation of coordinate systems with axis system deviation3. 视线角速度的计算
当稳定跟踪目标时,探测成像系统光轴和视线重合,那么视线角速度$\dot{q}$近似为光轴在惯性空间中转动的角速度在探测系YOZ面的投影。由于探测成像系统是固连在稳定平台上的,所以光轴在惯性空间中转动的角速度也是平台转动的角速度$\tilde{\omega }$。为了简化分析,本文假设载体不动,并定义如下矩阵函数:
$$ {\mathit{\boldsymbol{T}}_x}(\phi ) = \left[ {\begin{array}{*{20}{c}} 1&0&0\\ 0&{\cos \phi }&{ - \sin \phi }\\ 0&{\sin \phi }&{\cos \phi } \end{array}} \right], $$ $$ {\mathit{\boldsymbol{T}}_y}(\phi ) = \left[ {\begin{array}{*{20}{c}} {\cos \phi }&0&{\sin \phi }\\ 0&1&0\\ { - \sin \phi }&0&{\cos \phi } \end{array}} \right], $$ $$ {\mathit{\boldsymbol{T}}_z}(\phi ) = \left[ {\begin{array}{*{20}{c}} {\cos \phi }&{ - \sin \phi }&0\\ {\sin \phi }&{\cos \phi }&0\\ 0&0&1 \end{array}} \right]。 $$ 当存在轴系偏差时,各坐标系之间按图 3的方式进行变换。此时在惯性空间中,平台转动的角速度$\tilde \omega $在探测系中的投影为:
$$ \begin{array}{*{20}{c}} {\left[ {\begin{array}{*{20}{c}} {{{\tilde \omega }_{{\rm{d}}x}}}\\ {{{\tilde \omega }_{{\rm{d}}y}}}\\ {{{\tilde \omega }_{{\rm{d}}z}}} \end{array}} \right] = \\T_x^{ - 1}({\gamma _4})T_z^{ - 1}({\beta _4})T_y^{ - 1}({\alpha _4})\left( {\left[ {\begin{array}{*{20}{c}} 0\\ 0\\ {{\omega _{\rm{n}}}} \end{array}} \right] + T_z^{ - 1}({\phi _{\rm{n}}})T_x^{ - 1}({\beta _3})T_y^{ - 1}({\alpha _3})\left( {\left[ {\begin{array}{*{20}{c}} 0\\ {{\omega _z}}\\ 0 \end{array}} \right] + T_y^{ - 1}({\phi _z})T_z^{ - 1}({\beta _2})T_x^{ - 1}({\alpha _2})\left[ {\begin{array}{*{20}{c}} {{\omega _w}}\\ 0\\ 0 \end{array}} \right]} \right)} \right)}\\ { = {A_{\tilde \omega }}({\phi _z}, \, {\phi _{\rm{n}}}, \, {\alpha _2}, \, {\beta _2}, \, {\alpha _3}, \, {\beta _3}, \, {\alpha _4}, \, {\beta _4}, {\gamma _4})\left[ {\begin{array}{*{20}{c}} {{\omega _{\rm{w}}}}\\ {{\omega _{\rm{z}}}}\\ {{\omega _{\rm{n}}}} \end{array}} \right]} \end{array} $$ (1) 式中:φn为内环框架角;φz为中环框架角;ωn是位标器内环框架转动的角速度,其方向沿平台坐标系的Z轴;ωz是位标器中环框架转动的角速度,其方向沿中环坐标系的Y轴。ωw是位标器外环框架转动的角速度,其方向沿外环坐标系的X轴。于是按本文中对视线角速度$\dot q$的近似,其在探测系中为:
$$ \left[ {\begin{array}{*{20}{c}} {{{\dot q}_{{\rm{d}}x}}}\\ {{{\dot q}_{{\rm{d}}y}}}\\ {{{\dot q}_{{\rm{d}}z}}} \end{array}} \right] = \left[ {\begin{array}{*{20}{c}} 0&0&0\\ 0&1&0\\ 0&0&1 \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {{{\tilde \omega }_{{\rm{d}}x}}}\\ {{{\tilde \omega }_{{\rm{d}}y}}}\\ {{{\tilde \omega }_{{\rm{d}}z}}} \end{array}} \right] = {\mathit{\boldsymbol{A}}_{\dot q}}({\phi _{\rm{z}}}, \, {\phi _{\rm{n}}}, \, {\alpha _2}, \, {\beta _2}, \, {\alpha _3}, \, {\beta _3}, \, {\alpha _4}, \, {\beta _4}, {\gamma _4})\left[ {\begin{array}{*{20}{c}} {{\omega _{\rm{w}}}}\\ {{\omega _{\rm{z}}}}\\ {{\omega _{\rm{n}}}} \end{array}} \right] $$ (2) 式中:${\mathit{\boldsymbol{A}}_{\dot q}} = \left[ {\begin{array}{*{20}{c}} 0&0&0\\ 0&1&0\\ 0&0&1 \end{array}} \right]{\mathit{\boldsymbol{A}}_{\bar \omega }}$。
对于三自由度框架式红外稳定平台系统,稳定平台上正交安装了偏航/俯仰陀螺分别测量平台相对惯性空间的偏航/俯仰角速度;外环框架上安装有外环陀螺,可以测量外框架相对惯性空间的滚转角速度。理想情况下,稳定平台偏航/俯仰陀螺的敏感轴分别平行于平台坐标系的Y轴和Z轴,外环陀螺敏感轴与外环坐标系X轴平行。这里仍用第2章轴系偏差建模的方法描述陀螺的装配误差,记误差参数为α5、β5、α6、β6、α7、β7。其中,α5为外环陀螺敏感轴在外环系XOZ面的投影与外环系X轴的夹角;β5为外环陀螺敏感轴与外环系XOZ面的夹角;α6为中环陀螺敏感轴在平台系YOZ面的投影与平台系Y轴的夹角;β6为中环陀螺敏感轴与平台系YOZ面的夹角;α7为内环陀螺敏感轴在平台系XOZ面的投影与平台系Z轴的夹角;β7为内环陀螺敏感轴与平台系XOZ面的夹角。角度正负号按右手规则确定。那么在考虑轴系偏差情形下,陀螺的输出和外、中、内环框架的角速度满足下式:
$$ \begin{array}{*{20}{c}} {\left[ {\begin{array}{*{20}{c}} {{{\hat \omega }_{\rm{w}}}}\\ {{{\hat \omega }_{\rm{z}}}}\\ {{{\hat \omega }_{\rm{n}}}} \end{array}} \right] = \left[ {\begin{array}{*{20}{c}} {\cos {\alpha _5}\cos {\beta _5}}&{\sin {\beta _5}}&{ - \sin {\alpha _5}\cos {\beta _5}}\\ 0&0&0\\ 0&0&0 \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {{\omega _{\rm{w}}}}\\ 0\\ 0 \end{array}} \right] + \left[ {\begin{array}{*{20}{c}} 0&0&0\\ { - \sin {\beta _6}}&{\cos {\alpha _6}\cos {\beta _6}}&{\sin {\alpha _6}\cos {\beta _6}}\\ {\sin {\alpha _7}\cos {\beta _7}}&{ - \sin {\beta _7}}&{\cos {\alpha _7}\cos {\beta _7}} \end{array}} \right]}\\ {\quad \quad \quad \cdot \left( {\left[ {\begin{array}{*{20}{c}} 0\\ 0\\ {{\omega _{\rm{n}}}} \end{array}} \right] + T_z^{ - 1}({\phi _n})T_x^{ - 1}({\beta _3})T_y^{ - 1}({\alpha _3})\left( {\left[ {\begin{array}{*{20}{c}} 0\\ {{\omega _z}}\\ 0 \end{array}} \right] + T_y^{ - 1}({\phi _z})T_z^{ - 1}({\beta _2})T_x^{ - 1}({\alpha _2})\left[ {\begin{array}{*{20}{c}} {{\omega _{\rm{w}}}}\\ 0\\ 0 \end{array}} \right]} \right)} \right)}\\ { = {\mathit{\boldsymbol{A}}_g}({\phi _z}, \, {\phi _n}, \, \, {\alpha _2}, \, {\beta _2}, \, {\alpha _3}, \, {\beta _3}, \, {\alpha _5}, \, {\beta _5}, \, {\alpha _6}, \, {\beta _6}, \, {\alpha _7}, \, {\beta _7})\left[ {\begin{array}{*{20}{c}} {{\omega _{\rm{w}}}}\\ {{\omega _{\rm{z}}}}\\ {{\omega _{\rm{n}}}} \end{array}} \right]} \end{array} $$ (3) 式中:${\hat \omega _{\rm{w}}}$是外环陀螺的输出;${\hat \omega _{\rm{z}}}$是偏航陀螺的输出;${\hat \omega _{\rm{n}}}$是内环陀螺的输出。
将式(3)代入式(2),得到视线角速度在探测坐标系中的测量计算公式为:
$$ \left[ {\begin{array}{*{20}{c}} {{{\dot q}_{{\rm{d}}x}}}\\ {{{\dot q}_{{\rm{d}}y}}}\\ {{{\dot q}_{{\rm{d}}z}}} \end{array}} \right] = \mathit{\boldsymbol{T}}({\phi _z}, \, {\phi _n}, \, {\alpha _2}, \, {\beta _2}, \, {\alpha _3}, \, {\beta _3}, \, {\alpha _4}, \, {\beta _4}, {\gamma _4}\, {\alpha _5}, \, {\beta _5}, \, {\alpha _6}, \, {\beta _6}, \, {\alpha _7}, \, {\beta _7})\left[ {\begin{array}{*{20}{c}} {{{\hat \omega }_{\rm{w}}}}\\ {{{\hat \omega }_{\rm{z}}}}\\ {{{\hat \omega }_{\rm{n}}}} \end{array}} \right] $$ (4) 式中:$\mathit{\boldsymbol{T}} = {A_{\dot q}}A_g^{ - 1}$。
最后将其按图 3的坐标变换关系可得视线角速度在载体系中的测量计算公式为:
$$ \left[ {\begin{array}{*{20}{c}} {{{\dot q}_{bx}}}\\ {{{\dot q}_{by}}}\\ {{{\dot q}_{bz}}} \end{array}} \right] = {\mathit{\boldsymbol{T}}_y}({\alpha _1}){\mathit{\boldsymbol{T}}_z}({\beta _1}){\mathit{\boldsymbol{T}}_x}({\phi _w}){\mathit{\boldsymbol{T}}_x}({\alpha _2}){\mathit{\boldsymbol{T}}_z}({\beta _2}){\mathit{\boldsymbol{T}}_y}({\phi _z}){\mathit{\boldsymbol{T}}_y}({\alpha _3}){\mathit{\boldsymbol{T}}_x}({\beta _3}){\mathit{\boldsymbol{T}}_z}({\phi _n}){\mathit{\boldsymbol{T}}_y}({\alpha _4}){\mathit{\boldsymbol{T}}_z}({\beta _4}){\mathit{\boldsymbol{T}}_x}({\gamma _4})\mathit{\boldsymbol{T}}\left[ {\begin{array}{*{20}{c}} {{{\hat \omega }_{\rm{w}}}}\\ {{{\hat \omega }_{\rm{z}}}}\\ {{{\hat \omega }_{\rm{n}}}} \end{array}} \right] $$ (5) 当各误差参数都取零时,式(4)即蜕化成:
$$ \left[ {\begin{array}{*{20}{c}} {{{\dot q}_{{\rm{d}}x}}}\\ {{{\dot q}_{{\rm{d}}y}}}\\ {{{\dot q}_{{\rm{d}}z}}} \end{array}} \right] = \left[ {\begin{array}{*{20}{c}} 0&0&0\\ 0&1&0\\ 0&0&1 \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {{{\hat \omega }_{\rm{w}}}}\\ {{{\hat \omega }_{\rm{z}}}}\\ {{{\hat \omega }_{\rm{n}}}} \end{array}} \right] $$ (6) 将其坐标变换到载体系可得:
$$ \left[ {\begin{array}{*{20}{c}} {{{\dot q}_{bx}}}\\ {{{\dot q}_{by}}}\\ {{{\dot q}_{bz}}} \end{array}} \right] = {\mathit{\boldsymbol{T}}_x}({\phi _w}){\mathit{\boldsymbol{T}}_y}({\phi _z}){\mathit{\boldsymbol{T}}_z}({\phi _{\rm{n}}})\left[ {\begin{array}{*{20}{c}} 0\\ {{{\hat \omega }_{\rm{z}}}}\\ {{{\hat \omega }_{\rm{n}}}} \end{array}} \right] $$ (7) 也即理想情况下,三自由度框架式红外稳定平台系统稳定跟踪目标时,稳定平台上正交安装的偏航/俯仰陀螺可以直接测量出视线角速度。特别当框架轴系误差参数取零时,式(4)即蜕化成文献[7]中的结果。因此,式(4)也可以认为是对装调误差进行补偿,而且较文献[7]中的结果更具有一般性。
4. 仿真分析
对三自由度框架式红外稳定平台系统进行视线角速度测量试验。试验中载体静止,目标转台做30°/s匀速运动。记录稳定跟踪目标时的陀螺输出和框架角输出,如图 4和图 5所示。
用实测数据按第3章的计算公式进行离线仿真。仿真时,设置4种条件:忽略所有误差、忽略陀螺安装误差、忽略框架轴系误差和综合考虑各装调误差,具体误差参数如表 1所示。
表 1 装调误差参数设置Table 1. Parameters setting of installation errorsAxis system deviation /° Alignment error of gyros/° (α1, β1) (α2, β2) (α3, β3) (α4, β4, γ4) (α5, β5) (α6, β6) (α7, β7) 1 (0, 0) (0, 0) (0, 0) (0, 0, 0) (0, 0) (0, 0) (0, 0) 2 (0, -0.02) (0.02, 0.1) (-0.03, 0) (0.03, 0.08, 2.5) (0, 0) (0, 0) (0, 0) 3 (0, 0) (0, 0) (0, 0) (0, 0, 0) (-0.05, 0.04) (0.03, -0.4) (-0.02, 0.1) 4 (0, -0.02) (0.02, 0.1) (-0.03, 0) (0.03, 0.08, 2.5) (-0.05, 0.04) (0.03, -0.4) (-0.02, 0.1) 图 6给出了4种情况下的视线角速度曲线,其中实线表示忽略所有误差测量得到的结果,点划线是忽略陀螺安装误差的结果,长虚线是忽略框架轴系误差的结果,带“+”实线是综合考虑各装调误差得到的结果。图 7是图 6的局部放大。
![]() 图 6 仿真结果比较图Figure 6. Comparison with simulation results (solid line shows the result of neglecting all errors; dash dot line shows the result of neglecting alignment error of gyros; dash line shows the result of neglecting axis system deviation; solid line with "+" shows the result of considering all errors)
图 6 仿真结果比较图Figure 6. Comparison with simulation results (solid line shows the result of neglecting all errors; dash dot line shows the result of neglecting alignment error of gyros; dash line shows the result of neglecting axis system deviation; solid line with "+" shows the result of considering all errors)仿真试验结果表明,对装调误差进行补偿,可以提高视线角速度测量的精度。忽略装调误差时,测量计算的视线角速度较理论值最大偏差为4.08°/s;仅对框架轴系误差补偿时,视线角速度最大偏差减小到2.53°/s;仅对陀螺安装误差时,视线角速度最大偏差减小到1.49°/s;综合考虑各装调误差进行补偿,视线角速度最大偏差进一步减小到1.18°/s。总体来看,陀螺敏感轴交叉耦合对视线角速度精度的影响较框架轴系误差更显著。
5. 结论
本文系统研究了框架和陀螺均存在装调误差时,三自由度框架式红外视线角速度的计算方法,并进行仿真分析。结果表明,在计算视线角速度时如果对误差进行补偿,可以提高视线角速度的测量精度。在提高线角速度测量精度方面,补偿陀螺敏感轴交叉耦合的效果比补偿框架轴系偏差更显著。所以陀螺敏感轴交叉耦合对视线角速度的影响在各装调误差中最大。此结果对新型框架式稳定平台系统总体设计时的误差指标分配有重要的参考价值。
-
表 1 环境要求
Table 1 Environment configuration
Item Configuration OS Windows 11 CPU Intel Xeon Silver 4114T 12C GPU NVIDIA GTX1080Ti RAM 64 GB Deep learning framework PyTorch 1.8 Hard disk 1T  下载: 导出CSV
下载: 导出CSV
表 2 不同改进方法的识别效果
Table 2 Recognition effect of different improvement methods
Power equipment Method 1 Method 2 Ours Insulator AP 0.85 0.87 0.95 Arrester AP 0.86 0.89 0.98 CT AP 0.89 0.97 0.99 PT AP 0.87 0.96 0.98 Transformer bushing AP 0.89 0.92 0.97 mAP 0.87 0.92 0.97 recognition time /ms 27 7.8 5.6
下载: 导出CSV
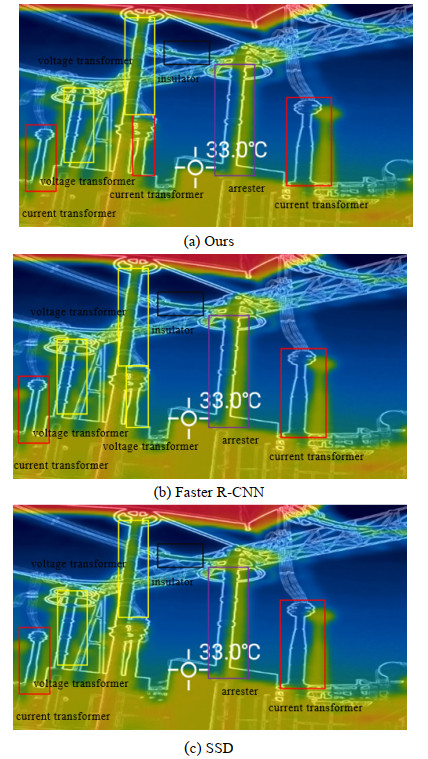
表 3 不同识别算法的效果
Table 3 Effects of different recognition algorithms
Methods mAP mRC Recognition
time/msOurs 0.95 0.97 5.8 SSD 0.85 0.88 32 Faster R-CNN 0.91 0.93 78
下载: 导出CSV
表 4 不同方法的参数量与模型大小
Table 4 Number of parameters and model size of different methods
Methods mAP@0.5 mAP@0.8 Parameter quantity /M FLOPs/G size/MB Ours 0.97 0.92 0.18 4.2 4.1 YOLO v5s 0.92 0.87 1.32 30.1 29 YOLO v4 0.94 0.83 9.83 323.9 257 Faster R-CNN 0.92 0.81 5.89 145.9 113 SSD 0.86 0.82 0.99 23.8 21.4
下载: 导出CSV
-
[1] 陈俊佑, 金立军, 段绍辉, 等. 基于Hu不变矩的红外图像电力设备识别[J]. 机电工程, 2013, 30(1): 5-8. https://www.cnki.com.cn/Article/CJFDTOTAL-JDGC201301003.htm CHEN Junyou, JIN Lijun, DUAN Shaohui, et al. Power equipment identification in infrared image based on Hu invariant moments[J]. Journal of Mechanical & Electrical Engineering, 2013, 30(1): 5-8. https://www.cnki.com.cn/Article/CJFDTOTAL-JDGC201301003.htm
[2] 邹辉, 黄福珍. 基于改进Fast-Match算法的电力设备红外图像多目标定位[J]. 中国电机工程学报, 2017, 37(2): 591-598. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGDC201702027.htm ZOU Hui, HUANG Fuzhen. Multi-target localization for infrared images of electrical equipment based on improved fast-match algorithm[J]. Proceedings of the CSEE, 2017, 37(2): 591-598. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGDC201702027.htm
[3] 郑含博, 李金恒, 刘洋, 等. 基于改进YOLOv3的电力设备红外目标检测模型[J]. 电工技术学报, 2021, 36(7): 1389-1398. https://www.cnki.com.cn/Article/CJFDTOTAL-DGJS202107009.htm ZHENG Hanbo, LI Jinheng, LIU Yang, et al. Infrared target detection model for power equipment based on improved YOLO v3[J]. Electrotechnical Technology, 2021, 36(7): 1389-1398. https://www.cnki.com.cn/Article/CJFDTOTAL-DGJS202107009.htm
[4] 徐奇伟, 黄宏, 张雪锋, 等. 基于改进区域全卷积网络的高压引线接头红外图像特征分析的在线故障诊断方法[J]. 电工技术学报, 2021, 36(7): 1380-1388. https://www.cnki.com.cn/Article/CJFDTOTAL-DGJS202107008.htm XU Qiwei, HUANG Hong, ZHANG Xuefeng, et al. On-line fault diagnosis method based on infrared image feature analysis of high-voltage lead connector based on improved area full convolutional network[J]. Transactions of the Chinese Society of Electrical Engineering, 2021, 36(7): 1380-1388. https://www.cnki.com.cn/Article/CJFDTOTAL-DGJS202107008.htm
[5] 罗舜. 电力变压器套管将军帽发热故障的红外诊断分析[J]. 变压器, 2018, 55(1): 50-53. https://www.cnki.com.cn/Article/CJFDTOTAL-BYQZ201801018.htm LUO Shun. Infrared diagnosis analysis of power transformer bushing coupler heating[J]. Transformer, 2018, 55(1): 50-53. https://www.cnki.com.cn/Article/CJFDTOTAL-BYQZ201801018.htm
[6] 张杰, 付泉泳, 袁野. 变压器局部放电带电检测技术应用研究[J]. 变压器, 2018, 55(8): 66-71. https://www.cnki.com.cn/Article/CJFDTOTAL-BYQZ201905024.htm ZHANG Jie, FU Quanyong, YUAN Ye. Application research of electric detection technology of partial discharge for transformer[J]. Transformer, 2018, 55(8): 66-71. https://www.cnki.com.cn/Article/CJFDTOTAL-BYQZ201905024.htm
[7] 吕俊, 王福田, 汤进, 等. 基于全景温度场的电力设备在线自动识别与诊断[J]. 计算机与现代化, 2015(8): 19-23. https://www.cnki.com.cn/Article/CJFDTOTAL-JYXH201508004.htm LV Jun, WANG Futian, TANG Jin, et al. Online automatic recognition and diagnosis of electrical devices via thermal panorama[J]. Computer and Modernization, 2015(8): 19-23. https://www.cnki.com.cn/Article/CJFDTOTAL-JYXH201508004.htm
[8] 商俊平, 李储欣, 陈亮. 基于视觉的绝缘子定位与自爆缺陷检测[J]. 电子测量与仪器学报, 2017, 31(6): 844-849. https://www.cnki.com.cn/Article/CJFDTOTAL-DZIY201706007.htm SHANG Junping, LI Chuxin, CHEN Liang. Location and detection for self-explode insulator based on vision[J]. Journal of Electronic Measurement and Instrumentation, 2017, 31(6): 844-849. https://www.cnki.com.cn/Article/CJFDTOTAL-DZIY201706007.htm
[9] 周可慧, 廖志伟, 肖异瑶, 等. 基于改进CNN的电力设备红外图像分类模型构建研究[J]. 红外技术, 2019, 41(11): 1033-1038. https://www.cnki.com.cn/Article/CJFDTOTAL-HWJS201911007.htm ZHOU Kehui, LIAO Zhiwei, XIAO Yiyao, et al. Construction of infrared image classification model for power equipments based on improved CNN[J]. Infrared Technology, 2019, 41(11): 1033-1038. https://www.cnki.com.cn/Article/CJFDTOTAL-HWJS201911007.htm
[10] 赵乐, 王先培, 姚鸿泰, 等. 基于可见光航拍图像的电力线提取算法综述[J]. 电网技术: 2021, 45(4): 1536-1546. https://www.cnki.com.cn/Article/CJFDTOTAL-DWJS202104035.htm ZHAO Le, WANG Xianpei, YAO Hongtai, et al. Summary of power line extraction algorithms based on visible light aerial images[J]. Power System Technology: 2021, 45(4): 1536-1546. https://www.cnki.com.cn/Article/CJFDTOTAL-DWJS202104035.htm
[11] 史晋涛, 李喆, 顾超越, 等. 基于样本扩充的Faster R-CNN电网异物监测技术[J]. 电网技术, 2020, 44(1): 44-51. https://www.cnki.com.cn/Article/CJFDTOTAL-DWJS202001005.htm SHI Jintao, LI Zhe, GU Chaoyue, et al. Faster R-CNN power grid foreign body monitoring technology based on sample expansion[J]. Power System Technology, 2020, 44(1): 44-51. https://www.cnki.com.cn/Article/CJFDTOTAL-DWJS202001005.htm
[12] 乔林, 孙宝华, 徐立波, 等. 多特征联合稀疏表示的电力设备图像识别方法[J]. 自动化技术与应用, 2020, 39(11): 120-123. https://www.cnki.com.cn/Article/CJFDTOTAL-ZDHJ202011026.htm QIAO Lin, SUN Baohua, XU Libo, et al. Power equipment image recognition method based on multi-feature joint sparse representation[J]. Automation Technology and Application, 2020, 39(11): 120-123. https://www.cnki.com.cn/Article/CJFDTOTAL-ZDHJ202011026.htm
[13] 李文璞, 谢可, 廖逍, 等. 基于Faster RCNN变电设备红外图像缺陷识别方法[J]. 南方电网技术, 2019, 13(12): 79-84. https://www.cnki.com.cn/Article/CJFDTOTAL-NFDW202110012.htm LI Wenpu, XIE Ke, LIAO Xiao, et al. Based on faster RCNN substation equipment infrared image defect recognition method[J]. Southern Power Grid Technology, 2019, 13(12): 79-84. https://www.cnki.com.cn/Article/CJFDTOTAL-NFDW202110012.htm
[14] 杨光俊. 卷积神经网络在电力设备红外图像识别中的应用研究[D]. 广州: 华南理工大学, 2019. YANG Guangjun. Research on the Application of Convolutional Neural Network in Infrared Image Recognition of Power Equipment[D]. Guangzhou: South China University of Technology, 2019.
[15] 付强, 姚建刚, 李唐兵, 等. 基于红外图像的绝缘子串钢帽和盘面区域自动提取方法[J]. 红外技术, 2016, 38(11): 969-974. http://hwjs.nvir.cn/cn/article/id/hwjs201611011 FU Qiang, YAO Jiangang, LI Tangbing, et al. Automatic extraction method of steel cap and disk area of insulator string based on infrared image[J]. Infrared Technology, 2016, 38(11): 969-974. http://hwjs.nvir.cn/cn/article/id/hwjs201611011
[16] 马鹏, 樊艳芳. 基于深度迁移学习的小样本智能变电站电力设备部件检测[J]. 电网技术, 2020, 44(3): 1148-1159. https://www.cnki.com.cn/Article/CJFDTOTAL-DWJS202003041.htm MA Peng, FAN Yanfang. Small sample smart substation power equipment component detection based on deep transfer learning[J]. Power System Technology, 2020, 44(3): 1148-1159. https://www.cnki.com.cn/Article/CJFDTOTAL-DWJS202003041.htm
[17] Tianchi J, LI Qiang, MAOSONG L, et al. Target detection method combining inverted residual block and YOLO v3[J]. Transducer and Microsystem Technologies, 2019, 36(11): 56-61.
[18] 王昕, 赵飞, 蒋佐富, 等. 迁移学习和卷积神经网络电力设备图像识别方法[J]. 中国测试, 2020, 46(5): 108-113. https://www.cnki.com.cn/Article/CJFDTOTAL-SYCS202005018.htm WANG Xin, ZHAO Fei, JIANG Zuofu, et al. Transfer learning and convolutional neural network power equipment image recognition method[J]. China Test, 2020, 46(5): 108-113. https://www.cnki.com.cn/Article/CJFDTOTAL-SYCS202005018.htm
[19] WU D, LV S, JIANG M, et al. Using channel pruning-based YOLOv4 deep learning algorithm for the real-time and accurate detection of apple flowers in natural environments[J]. Computers and Electronics in Agriculture, 2020, 178(5): 174-178.
[20] Selvaraju R R, Cogswell M, Das A, et al. Grad-CAM: visual explanations from deep networks via gradient based localization[C]//2017 IEEE International Conference on Computer Vision, 2017: 102-105.









计量
- 文章访问数: 123
- HTML全文浏览量: 24
- PDF下载量: 44
