
Infrared Image Segmentation for Electrical Equipment based on Fuzzy Inference
-
摘要: 使用模糊理论处理电气设备红外图像分割的不确定性,提出了一种基于模糊推理的电气设备红外图像分割算法。首先分别利用电气设备红外图像故障区域的像素灰度、像素点与图像质心的马氏距离以及图像膨胀操作定义了强度特征、全局故障可能性特征和局部灰度特征;然后根据特征的模糊语言值制定了27条模糊规则,设计了一种模糊推理红外图像分割算法;最后,从主观和客观评价指标上将算法与传统Otsu算法和FCM算法进行了对比。实验表明,该算法的分割精度和误分割率比其他两种算法都有一定的改善,同时该算法能够滤除图像中具有高亮度的干扰区域,对具有小亮度差和小面积故障区域的红外图像有较好的分割效果。Abstract: Fuzzy theory is considered to address the uncertainty of infrared image segmentation of electrical equipment, and a new algorithm based on fuzzy inference for infrared image segmentation of electrical equipment is proposed in this paper. First, the intensity, global fault probability, and local grayscale features were defined using the pixel grayscale of the fault region in the infrared image of the electrical equipment, Mahalanobis distance between pixel points, image center of mass, and image dilation operation. Subsequently, 27 fuzzy rules were formulated based on the fuzzy language values of the features, and an infrared image segmentation algorithm based on fuzzy inference was designed. Finally, the algorithm was compared with the traditional Otsu and FCM algorithms in terms of subjective and objective evaluation indexes. Further, the experimental results show that the segmentation accuracy and misclassification error of the proposed algorithm are better than those of the other two algorithms. The algorithm can filter out interference regions with high luminance in infrared images, and exhibits a better segmentation effect on infrared images with small luminance differences and small fault areas.
-
Keywords:
- fuzzy inference /
- infrared image segmentation /
- Mahalanobis distance /
- image dilation
-
0. 引言
电气设备作为典型的发热设备,其故障多伴随着部分区域温度的异常,所以对运行中的电气设备进行温度监控与故障诊断就成了保证电力安全稳定的重要一环[1]。在电网系统中运用红外成像技术对电气设备运行状态进行监测可以及时发现并消除潜在的电力安全威胁,同时红外监测技术可以对运行中的设备进行实时监测,减小因常规停电检修而带来的经济损失。图像分割作为基于红外图像的监测诊断系统的重要一环,它的分割精度与速度关系着能否准确和快速地实现故障诊断。
近年来针对红外图像的分割,学者们提出了很多新的方法。文献[2]利用信息熵特征与类间方差特征对Otsu算法的阈值判定函数进行了改进,通过改进的判定函数得到最优的阈值,提高了原算法的抗噪性能且较好地保持了目标的边缘。文献[3]在分割中引入了免疫克隆理论,提出了一种基于生长免疫场和克隆阈值的红外图像分割方法,实现了对于目标区域差异较大的红外图像的精确分割。冯振新等[4]结合极大稳定极值区域方法(Maximally Stable Extremal Regions, MSER)的多阈值机制,采用Mean shift算法实现了对电气设备红外故障区域的提取,该方法具有较低的误分割率。尽管上述方法在一般红外图像分割中取得了较好的分割效果,但是在具有较高亮度背景区域的电气设备红外图像中,这些算法的分割效果却差强人意。
因为红外图像的目标边缘具有不确定性和亮度的不均匀性,并且图像分割的本质是像素点的分类,该过程具有很大的模糊性,所以一些研究者将模糊理论应用到了电气设备红外图像分割中。模糊C均值聚类(Fuzzy C-means Method,FCM)和直觉模糊C均值聚类算法(Intuitionistic Fuzzy C-means Method, IFCM)都是比较经典的基于模糊理论的聚类方法,可以完成对电气设备红外图像的分割。但是这两种分割方法容易受到噪声的影响,而且容易将非故障区域误分割为故障区域。在FCM和IFCM中引入全局和局部信息,以此形成的各种变体可以解决这些问题[5-7]。
上述基于FCM和IFCM及其变体的红外图像分割方法,虽然能抑制高亮度背景区域对分割结果的影响,但是这些方法不能很好地分割具有低对比度或噪声密度大的红外图像[8]。考虑到红外图像分割具有不确定性,文献[8]定义了3种像素的特征,构建了模糊推理算法并应用到了船舶的红外图像当中,在一定程度上消除了船舶红外图像中的背景影响,成功地将船舶区域从红外图像中分割出来。但由于全局特征是由像素与图像质心的空间欧式距离得到的,该方法默认将船舶区域设置为圆形,而电气设备红外图像的故障区域具有不同的形状,由空间欧式距离提取出的全局特征很有可能也分割了非故障区域,因此不能简单地以圆形来描述。
针对上述研究和问题,本文利用模糊理论来处理红外图像分割的不确定性,根据电气设备红外图像故障区域的像素特点定义了3种特征变量,制定了27条模糊规则,设计了一种基于模糊推理的电气设备红外图像分割算法。最后,将此算法与其他传统算法进行了主观和客观上的对比,以验证本文方法的有效性和优越性。
1. 模糊推理
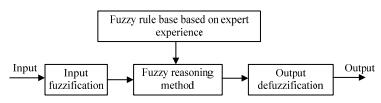
模糊推理是一种基于模糊理论的具有较强扩展能力的近似推理,主要用来解决带有较强不确定性的复杂问题。目前在模糊控制和图像处理等应用领域使用的多为较成熟的Mamdani型CRI(Compositional Rule of Inference)算法[9-12]。完整的模糊推理系统是由3部分组成:
1)模糊化:模糊化是将准确的输入值转换和映射为不确定的模糊量的过程,该过程是由输入特征语言变量的语言值所对应的隶属度函数完成的。
2)模糊推理(包括模糊规则和推理方法):模糊规则是保证模糊推理算法应用效果的关键之一,一般形式为“If A and (or) B, then C”,其中A和B为规则前件(前提条件),C为规则后件(结果),即若条件A和B满足,则结论C成立。
3)去模糊化:与模糊化相反,去模糊化是将由模糊推理方法得到的输出隶属度函数转换为准确输出的过程。
模糊推理系统的结构如图 1所示。
目前Mamdani型CRI模糊推理算法是在各领域中最常应用的方法,其步骤为:
第一步:将新输入特征x1*和x2*分别代入规则前件的隶属度函数μA(x)和μB(x)中,对输入特征进行模糊化,得到每个规则前件与新输入的适配度μA(x1*)和μB(x2*);
第二步:根据规则中使用的连接词“and”或者“or”,选择取小∧或取大∨操作合并适配度,得到点火强度fire。连接词若为“and”则使用式(1);若为“or”,则使用式(2);
$$\text { fire }=\mu_{\mathrm{A}}\left(x_1{ }^*\right) \wedge \mu_{\mathrm{B}}\left(x_2{ }^*\right)$$ (1) $$\text { fire }=\mu_{\mathrm{A}}\left(x_1{ }^*\right) \vee \mu_{\mathrm{B}}\left(x_2{ }^*\right)$$ (2) 第三步:利用点火强度fire对输出隶属度函数μC(y)进行蕴含操作。由于该步骤使用的是Mamdani蕴含算子,所以使用式(3)得到新输出隶属度函数${\mu _{{{\text{C}}^*}}}\left( y \right)$;
$$ {\mu _{{{\text{C}}^*}}}\left( y \right) = {\text{fire}} \wedge {\mu _{\text{C}}}\left( y \right) $$ (3) 第四步:在每一条规则下重复第一步到第三步的计算,得到不同规则下的输出隶属度函数,并利用取大∨操作合并得到总输出隶属度函数μ(y),最后利用式(4)对总输出隶属度函数去模糊化,得到输出μ0。
$$ {\mu _0} = \frac{{\int\limits_y {y\mu \left( y \right){\text{d}}y} }}{{\int\limits_y {\mu \left( y \right){\text{d}}y} }} $$ (4) 2. 特征语言变量和模糊规则设计
2.1 可能故障区域提取
为了构建输入特征,我们首先需要定位可能故障的区域所在的大致位置与范围。文献[13]提出了一种基于方差的方法来定位红外图像中船舶的位置,该方法计算简单且具有较高的精度。为了获取更多的故障区域像素来提高提取的可能故障区域的完整度和准确度,本文利用基于方差的方法得到的部分故障区域像素的灰度值来获取阈值对图像进行初次分割,得到可能故障区域。具体的区域提取步骤如下:
第一步:计算灰度图像I中每一个像素的3×3邻域方差,得到方差图像S;
第二步:计算方差图像S的均值m和标准差v;
第三步:利用阈值t1对方差集图像S进行分割,得到二值图像S′。其中t1取m+8v;
第四步:然后利用阈值t2对原灰度图像I进行分割,得到故障可能区域IFault。本文取t2=Imean′+0.38×(255-Imean′),其中Imean′为像素集合I′的灰度均值,I′={I(x, y)|I(x, y)×S′(x, y)≠0},I(x, y)和S′(x, y)分别为坐标(x, y)处原灰度图像I和二值图像S′的灰度值。
2.2 强度特征
电气设备发生故障往往伴随着高热量的产生,在红外图像中,电气设备故障区域的亮度值往往比正常区域以及背景区域更高。然而,由于故障区域与正常区域以及周围环境之间存在着热交换,在大多数情况下故障区域和设备正常区域的轮廓是模糊的。考虑到这一点,本文利用像素的归一化灰度值来表征电气设备红外图像像素的强度特征x1。若红外图像中某像素灰度值为v,图像中最大灰度值和最小灰度值分别为vmax和vmin,则该像素的强度特征可表示为式(5):
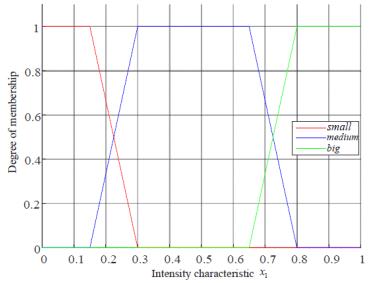
$$ {x_1} = \frac{{v - {v_{\min }}}}{{{v_{\max }} - {v_{\min }}}} $$ (5) 将强度特征作为输入语言变量,并将其划分为small, medium, big三个模糊语言值(灰度等级),其表达的意思分别为灰度值很小、灰度值为中等水平和灰度值很大。选取梯形函数作为强度特征的模糊化隶属度函数,函数图像如图 2所示。
2.3 全局故障可能性特征
马氏距离是一种有效的计算样本集相似度的方法。与欧式距离不同的是,马氏距离与样本集的特性有关,而不只单单考虑两个样本间的距离,这样使得马氏距离更适合用于处理具有不同样本特性的集合。假设某样本集中有s个样本,第i个样本是n维列向量Xi=(x1i, x2i, …, xni)T,整s个样本集的均值可表示为式(6),其中n维列向量m=(m1, m2, …, mn)T,样本集的协方差矩阵cov可由式(7)计算得到,则样本X与样本集的马氏距离dM(X)可表示为式(8)。
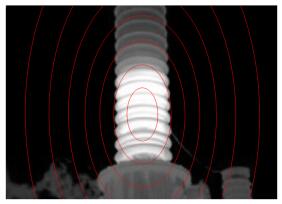
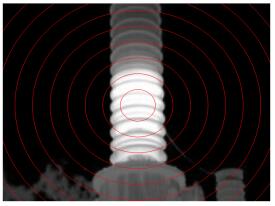
$$\boldsymbol{m}=\frac{1}{s} \sum\limits_\limits{i=1}^s \boldsymbol{X}^i$$ (6) $$\operatorname{cov}=\frac{1}{s} \sum\limits_\limits{i=1}^s\left(\boldsymbol{X}^i-\boldsymbol{m}\right)\left(\boldsymbol{X}^i-\boldsymbol{m}\right)^{\mathrm{T}}$$ (7) $$d_M(X)=\sqrt{(\boldsymbol{X}-\boldsymbol{m})^{\mathrm{T}} \bf{c o v}^{-1}(\boldsymbol{X}-\boldsymbol{m})}$$ (8) 若使用像素点坐标与质心坐标的欧式距离来表征像素的全局距离特征,那么该特征只能将故障区域描述为圆形区域,这样是不合理的。通过观察马氏距离的表达式,可以发现当样本点和均值相同时,马氏距离会随着协方差矩阵的变化而变化。当协方差矩阵为单位矩阵时,马氏距离便变成了欧氏距离。若利用可能故障区域的像素坐标向量来生成协方差矩阵,则像素坐标的马氏距离将根据可能故障区域形状和位置的变化而变化。图 3和图 4分别为电容式电压互感器红外图像的马氏距离等高线和欧式距离等高线,可以看出马氏距离等高线更贴合红外图像故障区域的形状,说明使用马氏距离来描述故障区域的特征更合理。
考虑到这点,接下来将利用马氏距离和二维高斯函数设计全局故障可能性特征x2。全局故障可能性特征x2可通过以下步骤获得:
第一步:利用2.1节的步骤计算得到可能故障区域IFault;
第二步:利用式(6)和(7)计算可能故障区域IFault内像素点坐标的二维均值列向量m和协方差矩阵。其中,s为IFault中可能故障区域的像素个数,Xi为第i个可能故障像素的二维坐标列向量(xi, yi)T。
第三步:通过式(8)和(9)计算输入图像像素点Xk与可能故障区域像素坐标集合间的马氏空间距离dM(Xk)和故障可能性Pk,然后将Pk进行归一化处理,便可得到全局故障可能性特征x2。
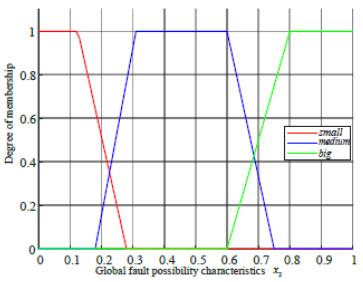
$$P_k=\frac{1}{2 \pi|\operatorname{cov}|^{0.5}} \mathrm{e}^{-\left(\frac{1}{10}\left(d_M\left(X^k\right)\right)^{1.2}\right)}$$ (9) $$ {x_2} = \frac{{{P_k}}}{{\max \left( {{P_k}} \right)}} $$ (10) 将全局故障可能性特征划分为3个特征语言值small,medium和big,隶属度函数图像如图 5所示。
2.4 局部灰度特征
图像膨胀是图像形态学处理的一个操作运算子。对于二值图像,图像膨胀能够在白色区域的邻域范围内对白色区域进行延展,该范围由选取的结构元素的大小和类型决定。假设S为二值图像,B为结构元素,$\oplus$表示图像的膨胀操作,则有:
$$S \oplus B=\{z \mid B(z) \cap S \neq \varnothing\}$$ (11) 该式表达的意思为让结构元素B在z平面上移动,如果B的结构中心移动到z点时,B与S有公共的交集(非空集),则认为这样的z点构成的集合是B对图像S的膨胀图像。膨胀操作多用于填补二值图像的空洞和对区域的局部进行像素拓展。在二值图像分割中,一定次数的膨胀操作有助于提取完整的分割区域。
由于单单使用强度特征和全局故障可能性特征,无法获取故障区域的轮廓,所以接下来将对提取的故障可能区域进行膨胀操作来获取局部灰度分布特征x3,构造过程如下:
第一步:利用2.1节的步骤计算得到可能故障区域IFault0以及区域内像素最大灰度值Imax;
第二步:利用结构形态学算子B对可能故障区域IFaulti-1进行膨胀处理,得到膨胀后的区域IFaulti。其中IFaulti表示第i次图像膨胀后得到的区域,本文的结构形态学算子B选取30×30的矩形结构元素。
第三步:根据Ci=IFaulti-IFaulti-1,得到膨胀差区域Ci。
第四步:根据Ci区域内的像素灰度值xC计算vi,并将区域Ci中的像素值置为vi,vi计算表达式如(12),其中num为执行膨胀操作的总次数,本文选取num=15。
$$ {v_i} = \left( {1 - \left( {\frac{i}{{{\text{num}}}}} \right)} \right)*\frac{1}{{0.2\sqrt {2{\text{π }}} }}{{\text{e}}^{ - \left( {\frac{{{{\left( {{x_C} - {I_{\max }}} \right)}^2}}}{{0.08}}} \right)}} $$ (12) 第五步:重复执行第二步到第四步的步骤num次,则由式(13)可得到局部灰度分布特征图x3。
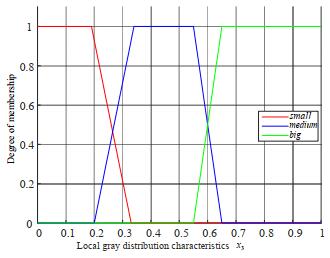
$$x_3=I_{\text {Fault }}{ }^0+C_1+C_2+\cdots+C_{\mathrm{num}}$$ (13) 将局部灰度特征划分为3个特征语言值small,medium和big,相应的隶属度函数图像如图 6所示。
2.5 模糊规则
将上述设计的强度特征x1、全局故障可能性特征x2和局部灰度分布特征x3作为模糊推理系统的输入,输出为像素点隶属于故障区域的程度(也可表示输出灰度值)。由于3个输入特征均含有3个特征语言值,所以共可设计27条规则,基本设计原则为“若像素点灰度值越大,故障可能性越大,且局部灰度特征越大,则该像素点隶属于故障区域的程度越高(像素的输出灰度值越大)”,具体规则制定如表 1。
表 1 基于多特征改进的模糊规则Table 1. Fuzzy rules based on multi-feature improvementIntensity characteristic Global failure possibility characteristics Local gray distributioncharacteristics Failure membership characteristics 1 small small small small 2 small small medium small 3 small small big medium 4 small medium small small 5 small medium medium medium 6 small medium big medium 7 small big small small 8 small big medium small 9 small big big big 10 medium small small medium 11 medium small medium medium 12 medium small big medium 13 medium medium small medium 14 medium medium medium medium 15 medium medium big big 16 medium big small medium 17 medium big medium medium 18 medium big big big 19 big small small medium 20 big small medium medium 21 big small big medium 22 big medium small medium 23 big medium medium medium 24 big medium big big 25 big big small medium 26 big big medium medium 27 big big big big 3. 基于多特征输入的模糊推理红外图像分割算法
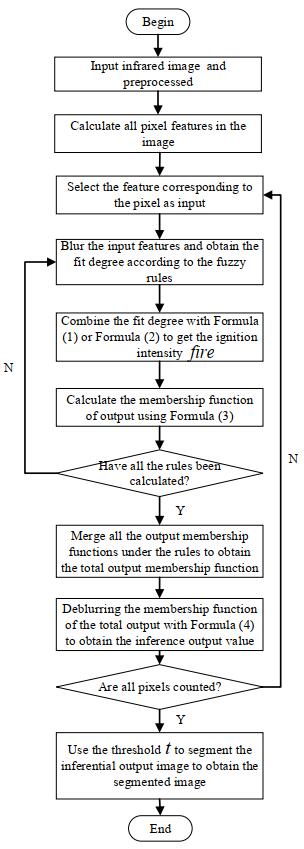
利用输入特征和制定的模糊规则可进一步设计基于模糊推理的红外图像分割算法,由于设计的模糊推理系统并不能直接地完成图像分割,但是由推理系统得到的图像各区域间的差异变得很明显,后续再利用阈值t对图像进行再分割,该阈值的选取取决于输出特征隶属度函数,本文取t=0.75。算法流程图如图 7所示。
![]() 图 7 基于模糊推理的电气设备红外图像分割算法流程图Figure 7. Flow chart of infrared image segmentation algorithm for electrical equipment based on fuzzy reasoning
图 7 基于模糊推理的电气设备红外图像分割算法流程图Figure 7. Flow chart of infrared image segmentation algorithm for electrical equipment based on fuzzy reasoning算法的具体步骤如下:
第一步:读入红外图像,将红外图像二值化,并利用中值滤波对图像进行去噪;
第二步:根据2.2节、2.3节和2.4节的步骤计算图像中所有像素的强度特征x1、全局故障可能性特征x2和全局距离特征x3;
第三步:选取像素对应的特征x1、x2和x3作为模糊推理系统的新输入x=(x1, x2, x3);
第四步:从模糊规则库中选取新规则,将新输入的特征值代入规则前件的隶属度函数中,得到每个输入特征与当前规则前件的匹配程度,即适配度;
第五步:利用$ \wedge $和$ \vee $对适配度进行合并,得到点火强度值fire,由于表 1中的连接词为“and”,所以采用式(1)计算点火强度;
第六步:利用点火强度值fire对与规则对应的规则后件隶属度函数进行$ \wedge $操作,即利用fire值对规则后件隶属度函数进行“削顶”,得到新输出隶属度函数;
第七步:若得到了所有的规则下的输出隶属度函数,则进入下一步;否则转至第四步;
第八步:对27条规则下得到的新输出隶属度函数利用$ \vee $算子进行合并,得到总输出隶属度函数;
第九步:利用式(4)对总输出隶属度函数进行去模糊化,得到输出灰度值;
第十步:若图像中的所有像素处理完毕,则进入下一步;否则转入第三步;
第十一步:利用固定阈值t对推理输出图像进行分割,得到最后的分割图像,算法结束。
4. 实验对比及结果分析
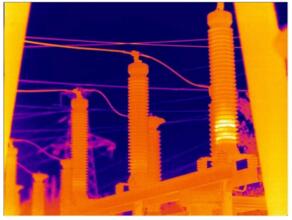
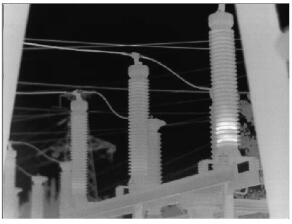
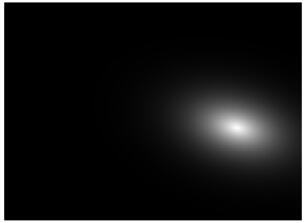
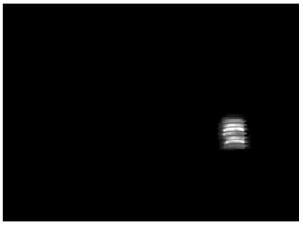
为了突出表现本文算法的优势,将本文算法在AMD Ryzen 5 3500U,8.00 GB内存,64位PC端MATLAB R2021上自编程实现。图 8为110 kV变电站红外图像,图 9为图 8对应的灰度图像。通过2.1~2.4节的步骤,可以得到相应的可能故障区域、强度特征图、全局故障可能性特征图和局部灰度分布特征图,分别如图 10~图 13所示。
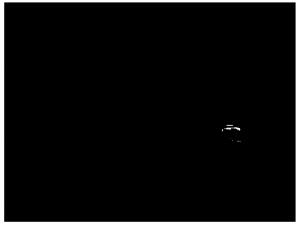
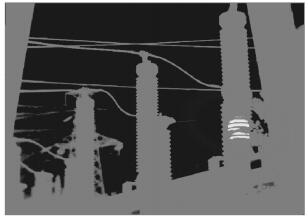
将每个像素对应的特征作为模糊推理系统的输入,可以得到推理输出图像,输出图像如图 14所示,可以明显得看到,推理输出图像中的故障区域周围的模糊边缘变得清晰了,同时电气设备的区域间的边缘也得到了增强,这有助于精确地分割。最后通过阈值t=0.75对推理输出图像进行分割,便可得到分割图像,分割结果如图 15所示。
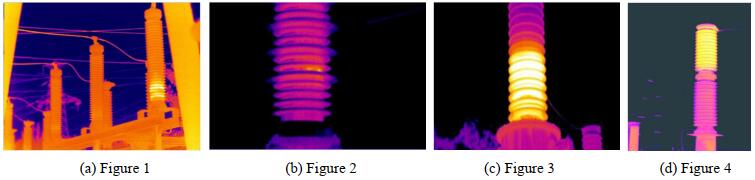
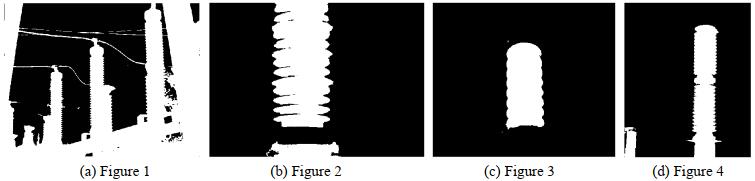
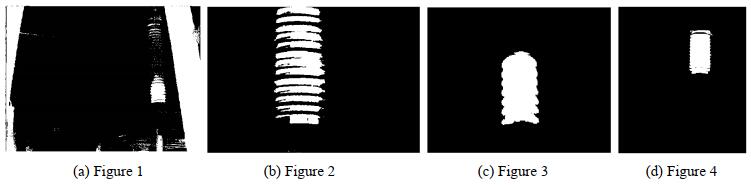
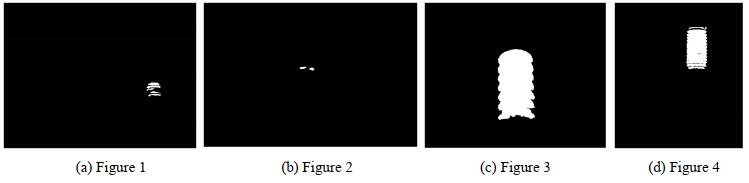
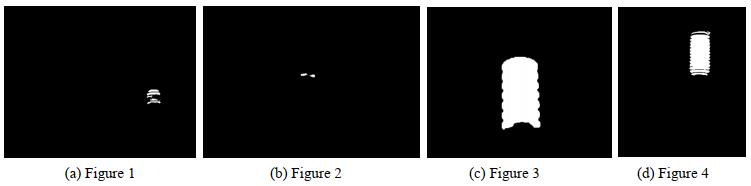
接下来将本文提出的算法与Otsu算法和FCM算法进行实验对比,其中FCM算法采用的是3类划分,并选取其中的故障区域作为FCM算法的实验结果。图 16为4幅具有代表性特征的电气设备红外图像,故障区域的亮度都比周围区域要高,其中图像1的左上角和右下角存在部分高亮干扰区域,图像2的故障区域具有面积小和亮度差小的特点,而图像3和图像4的故障区域面积较大,且都为矩形。图 17~图 19分别为Otsu算法、FCM算法和本文算法的分割效果,图 20为电气设备红外图像故障区域的标准分割图。
在图像1、图像2和图像4中,Otsu算法将整个电气设备分割了出来,但并没有得到故障区域。而在图像4中,由于故障区域与周围区域的亮度差很大,Otsu算法将大致的故障区域分割了出来,但存在过分割。FCM算法对图像3和图像4的分割效果良好,而对于具有高亮干扰区域的图像1和具有小面积和小亮度差的图像2,FCM算法明显地出现了误分割情况。相较于Otsu算法和FCM算法,本文算法的分割明显更合理,没有出现过分割和误分割的情况,对于高亮干扰区域也能较好地滤除(图像1),同时也能完整地分割出小面积和亮度差小的故障区域(图像2)。
同样地,从客观指标交互比(IOU, Intersection over Union)[14]和误分割率(ME, Misclassification Error)[8]上对本文提出的分割算法的分割效果进行评价与对比。算法的分割效果评价指标对比如表 2所示。从表中可以看出本文算法的平均交互比比其他算法(Otsu算法、FCM算法)都要高,误分割率也是最低的,分割表现比FCM算法和Otsu算法都要优秀。
表 2 算法评价指标对比Table 2. Algorithm evaluation index comparison5. 结论
本文根据电气设备红外图像故障区域的像素特点,定义了强度特征、全局故障可能性特征和局部灰度分布特征,制定了27条模糊规则,提出了一种基于模糊推理的电气设备红外图像分割算法,并将所提算法与Otsu算法和FCM算法做了对比。实验表明,该算法的分割效果比Otsu和FCM算法都要好,不仅能够合理地分类红外图像中具有较高像素值的干扰区域,并且对于具有小面积和小亮度差的故障区域的红外图像依然能实现准确的分割。该方法拓展了模糊推理的应用范围,提高了电气设备红外图像故障区域分割的准确性,为运维人员和计算机诊断系统提供一个更值得信任的诊断依据。
-
![]()
图 7 基于模糊推理的电气设备红外图像分割算法流程图
Figure 7. Flow chart of infrared image segmentation algorithm for electrical equipment based on fuzzy reasoning
表 1 基于多特征改进的模糊规则
Table 1 Fuzzy rules based on multi-feature improvement
Intensity characteristic Global failure possibility characteristics Local gray distributioncharacteristics Failure membership characteristics 1 small small small small 2 small small medium small 3 small small big medium 4 small medium small small 5 small medium medium medium 6 small medium big medium 7 small big small small 8 small big medium small 9 small big big big 10 medium small small medium 11 medium small medium medium 12 medium small big medium 13 medium medium small medium 14 medium medium medium medium 15 medium medium big big 16 medium big small medium 17 medium big medium medium 18 medium big big big 19 big small small medium 20 big small medium medium 21 big small big medium 22 big medium small medium 23 big medium medium medium 24 big medium big big 25 big big small medium 26 big big medium medium 27 big big big big  下载: 导出CSV
下载: 导出CSV
-
[1] 苏海锋, 赵岩, 武泽君, 等. 基于改进RetinaNet的电力设备红外目标精细化检测模型[J]. 红外技术, 2021, 43(11): 1104-1111. http://hwjs.nvir.cn/article/id/3233a6a1-cbf0-4110-baa5-2a56e551f092 SU Haifeng, ZHAO Yan, WU Zejun, et al. Refined infrared object detection model for power equipment based on improved RetinaNet[J]. Infrared Technology, 2021, 43(11): 1104-1111. http://hwjs.nvir.cn/article/id/3233a6a1-cbf0-4110-baa5-2a56e551f092
[2] 陈飞. 改进的交互式Otsu红外图像分割算法[J]. 计算机测量与控制, 2020, 28(9): 248- 251. https://www.cnki.com.cn/Article/CJFDTOTAL-JZCK202009049.htm CHEN Fei. An improved interactive Otsu infrared image segmentation algorithm[J]. Computer Measurement & Control, 2020, 28(9): 248-251. https://www.cnki.com.cn/Article/CJFDTOTAL-JZCK202009049.htm
[3] YU X, ZHOU Z, GAO Q, et al. Infrared image segmentation using growing immune field and clone threshold[J]. Infrared Physics & Technology, 2018, 88: 184-193. http://www.sciencedirect.com/science/article/pii/S1350449517306308
[4] 冯振新, 周东国, 江翼, 等. 基于改进MSER算法的电力设备红外故障区域提取方法[J]. 电力系统保护与控制, 2019, 47(5): 123-128. https://www.cnki.com.cn/Article/CJFDTOTAL-JDQW201905015.htm FENG Zhenxin, ZHOU Dongguo, JIANG Yi, et al. Fault region extraction using improved MSER algorithm with application to the electrical system[J]. Power System Protection and Control, 2019, 47(5): 123-128. https://www.cnki.com.cn/Article/CJFDTOTAL-JDQW201905015.htm
[5] HU F, CHEN H, WANG X. An intuitionistic Kernel-based fuzzy C-means clustering algorithm with local information for power equipment image segmentation[J]. IEEE Access, 2020, 8: 4500-4514. DOI: 10.1109/ACCESS.2019.2963444
[6] QI C, LI Q, LIU Y, et al. Infrared image segmentation based on multi-information fused fuzzy clustering method for electrical equipment[J]. International Journal of Advanced Robotic Systems, 2020, 17(2): 1729881420909600. http://www.xueshufan.com/publication/3009600905
[7] WEI D, WANG Z, SI L, et al. An image segmentation method based on a modified local-information weighted intuitionistic Fuzzy C-means clustering and gold-panning algorithm[J]. Engineering Applications of Artificial Intelligence, 2021, 101: 104209. DOI: 10.1016/j.engappai.2021.104209
[8] BAI X, LIU M, WANG T, et al. Feature based fuzzy inference system for segmentation of low-contrast infrared ship images[J]. Applied Soft Computing, 2016, 46: 128-142. DOI: 10.1016/j.asoc.2016.05.004
[9] 王力斌, 刘树伟. 基于模糊推理的油门防误踩系统控制研究[J]. 控制工程, 2020, 27(8): 1462-1467. https://www.cnki.com.cn/Article/CJFDTOTAL-JZDF202008026.htm WANG Libin, LIU Shuwei. Research on the control system of preventing false stepping the accelerating pedal based on the fuzzy theory[J]. Control Engineering of China, 2020, 27(8): 1462-1467. https://www.cnki.com.cn/Article/CJFDTOTAL-JZDF202008026.htm
[10] 张洪群, 顾吟雪, 郭擎. 灰色关联分析与模糊推理边缘检测图像融合法[J]. 遥感信息, 2020, 35(1): 15-27. https://www.cnki.com.cn/Article/CJFDTOTAL-YGXX202001003.htm ZHANG Hongqun, GU Yinxue, GUO Qing. Image fusion based edge detection of grey relational analysis and fuzzy inference[J]. Remote Sensing Information, 2020, 35(1): 15-27. https://www.cnki.com.cn/Article/CJFDTOTAL-YGXX202001003.htm
[11] Vijayakumar S, Santhi V. Speckle noise reduction in SAR images using fuzzy inference system[J]. International Journal of Fuzzy System Applications (IJFSA), 2019, 8(4): 60-83.
[12] Arya K V. A new fuzzy rule based pixel organization scheme for optimal edge detection and impulse noise removal[J]. Multimedia Tools and Applications, 2020, 79(45): 33811-33837. DOI: 10.1007/s11042-020-08707-x?utm_source=xmol&utm_content=meta
[13] BAI X, CHEN Z, ZHANG Y, et al. Infrared ship target segmentation based on spatial information improved FCM[J]. IEEE Transactions On Cybernetics, 2015, 46(12): 3259-3271. http://ieeexplore.ieee.org/document/7026038/
[14] LONG J, Shelhamer E, Darrell T. Fully convolutional networks for semantic segmentation[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2015: 3431-3440.
-
期刊类型引用(6)
1. 崔晓伟. 基于CNN的电气设备图像故障检测技术. 自动化应用. 2025(02): 85-87 .  百度学术
百度学术
2. 王琦,张欣唯,童悦,王昱晴,张锦,王咏涛,袁小翠. 一种复杂背景下电气设备红外图像精确分割方法. 激光与红外. 2025(03): 399-407 . 百度学术
3. 廖晓辉,谢子晨,路铭硕. 基于YOLOv5s和Android部署的电气设备识别. 郑州大学学报(工学版). 2024(01): 122-128 . 百度学术
4. 张宇,袁小翠,许志浩,康兵. 复杂背景下断路器红外图形精确分割方法. 江西电力. 2024(03): 1-7 . 百度学术
5. 卜婷. 电机电气故障红外图像分割方法研究. 今日制造与升级. 2024(11): 132-134 . 百度学术
6. 李奇泽. 基于区域级隶属度函数的图像分割评估分析. 电子产品世界. 2023(10): 54-57 . 百度学术
其他类型引用(2)

计量
- 文章访问数: 179
- HTML全文浏览量: 31
- PDF下载量: 29
- 被引次数: 8
