
Infrared Image Defect Detection Based on the Algorithm of Intuitionistic Fuzzy C-Means Clustering
-
摘要: 红外热成像技术常被用来检测碳纤维增强复合材料的内部缺陷,但常用的光学热源加热效率低,需要近距离加热试件。激光具有能量集中、衰减小的优点,其作为加热源有助于实现远距离检测。本文介绍了线激光扫描红外热成像无损检测技术,并对加热过程中材料内部热传导进行了分析。其次,针对红外图像均匀性差、对比度弱,不利于缺陷特征提取的问题,本文引入基于直觉模糊C均值聚类算法的图像分割方法来提取缺陷边缘,与K-Means聚类方法相比,该方法可以提升缺陷模糊边缘的识别和检测能力,保留更多图像的细节信息,有助于准确提取缺陷边缘特征。Abstract: Infrared thermal imaging technology is often used to detect internal defects in carbon-fiber-reinforced polymers; however, commonly used optical heat sources are inefficient and require the specimen to be heated over a short distance. Lasers offer the advantages of energy concentration and low-energy attenuation. As a heating source, it helps achieve long-distance nondestructive testing (NDT). This paper introduces the technology of line laser scanning infrared thermal imaging and analyzes the thermal transmission process inside the material during the heating process. Second, the uniformity and contrast of the infrared image are poor, which is not conducive to defect-feature extraction. Here, image segmentation methods were based on the intuitionistic fuzzy C-means (IFCM) clustering algorithm to extract defect edges. Compared with the K-means clustering method, this method can improve the recognition and detection of fuzzy edges of defects, retain more detailed information of images, and help extract the features of the defect edges accurately.
-
Keywords:
- carbon fiber reinforced polymer /
- infrared thermal imaging /
- NDT /
- IFCM
-
0. 引言
目标检测是计算机视觉领域的研究热点之一[1]。无人机搭载红外相机进行目标检测在军事侦察[2]、智能交通、智能农业[3]等领域有着广泛应用。然而,主流目标检测算法依赖于白天或其他光照充足场景,在夜间或缺乏光照的弱光场景往往精度不足。红外航拍场景具有视场广、灵活性高等特点,其图像采集通过热成像仪感知环境温度信息,不易受光照影响,在弱光环境下亦可获得较好的成像效果。因此红外航拍目标检测已经成为计算机视觉领域的重点课题之一。
早期的航拍目标检测一般利用手工设计特征[4]方式,但航拍红外图像往往背景复杂、检测目标小、尺度变化大,对传统方法提出更大的挑战。当前,得益于计算机视觉技术的发展,基于深度学习的检测方法成为主流,依据检测流程可分为单阶段(One-Stage)和双阶段(Two-Stage)两类。双阶段目标检测以Faster-RCNN(Region-based Convolutional Neural Networks)[5]系列为代表,一般精度较高。单阶段目标检测以YOLO(You Only Look Once)[1, 6-8]系列和SSD(Single Shot MultiBox Detector)[9]为代表。机载平台往往内存功耗受限、算力不足,单阶段算法一般复杂度更低,运行速度更快,更适合应用于边缘设备,YOLO是其中的典型代表。
对比可见光图像,红外图像对比度低、纹理信息不丰富,尽管面向可见光大数据的深度模型已取得巨大进步,但面向红外图像实现准确而鲁棒的目标检测仍具有很大的挑战[4]。可见光图像纹理信息丰富,但易受光照条件影响,红外成像不受光照影响,因此对红外与可见光图像进行图像融合是一项有益的探索[10],但同步成像或彩色-红外图像配准成本较高。因此仅使用热红外图像实现目标检测[11]成为领域的研究重点之一。
视觉显著性对深入挖掘图像信息具有重要意义。显著性目标检测(Salient Object Detection, SOD)[12]将图像中显著主体目标进行像素级分割,通过颜色、深度等信息与周围环境的差异定位显著性目标,已成功应用于目标识别[13-14]等领域。研究表明,显著图网络获得的语义特征能更好地表达目标不同尺度的上下文信息[15]。但显著图缺乏纹理特征,本文将红外图像显著图与原始红外图像进行融合,以挖掘更多信息。
基于以上分析,针对红外航拍场景特点和需求,本文提出了一种融合视觉显著性的红外航拍行人检测方法。首先以YOLOv4-tiny作为基础网络,针对红外航拍场景数据特点,通过K-Means算法进行先验框重聚类,增加目标检测针对性。进而采用先进的深度显著性目标检测网络U2-Net[15]从热红外图像生成显著性图,与原始热图像进行融合挖掘更多图像信息。并分析基于像素级加权融合和通道替换融合两种方法对航拍红外目标检测的影响,最后实验验证了本文方法的有效性。为其他红外目标检测任务提供了一种可行的研究思路和丰富的实验参考。
1. 相关工作
1.1 目标检测
在过去20年中,可见光图像是目标检测的主要对象。传统目标检测主要通过手工提取特征的方式,例如方向梯度直方图(Histogram of Oriented Gradient, HOG)[4],但面向复杂场景精度有限。
近年来,基于深度学习的目标检测取得了重大突破,主要分为双阶段目标检测和单阶段目标检测。前者以R-CNN[5]系列为代表,该类算法准确率较高,但计算成本高,一般不适用于无人机机载航拍目标检测。
单阶段算法最具代表性的是YOLO系列算法[9],YOLO基于回归思想,直接在输出层回归边界框(Bounding Box)的位置和所属类别,速度上更占优势[6]。YOLOv2[7]借鉴了Faster RCNN的锚框(anchor)机制,使得速度和精度上升了一个台阶。YOLOv3[8]引入Darknet-53特征提取网络与多尺度检测,使用逻辑回归代替了Softmax,检测效果达到了当时业界的领先水平。Alexey[1]等对YOLOv3的网络结构、数据预处理等进行优化提出YOLOv4,实现了检测速度和精度的再一次突破。其中YOLOv4-tiny是面向边缘计算优化的检测模型。
1.2 红外目标检测
红外成像技术具有穿透性强、不受光照影响等特点,能克服光照变化对检测任务的影响。但红外图像仍然存在一定的缺点:纹理少、对比度弱。传统的红外航拍目标检测主要基于手工设计特征。刘若阳等[16]提出了一种基于局部协方差矩阵判别模型来克服红外小目标检测中的结构化边缘、非结构化杂波和噪声等问题。袁明等[17]通过中值滤波去噪,然后使用形态学特征抑制背景,最后构造局部对比度通过阈值分割目标。一些学者将红外图像与可见光图像进行融合。Li等[10]提出了光照感知模块,依据光照条件进行可见光与红外图像融合,实现多光谱行人检测。Chen等[18]在SSD架构末端增加解码器模块产生多尺度特征,并引入注意力模块实现红外行人检测器检测性能的提高。
可见光与红外图像融合往往需要同步成像,成本较高。针对仅使用红外图像的航拍目标检测,代牮等[19]通过增加注意力、改进损失函数与预选框筛选改进YOLOv5,实现复杂背景的红外弱小目标检测。本文仅采用红外图像进行目标检测,通过挖掘显著性信息提升算法精度。
1.3 基于视觉显著性的目标检测
显著性目标检测在图像中进行像素级分割[14, 20],是计算机视觉领域的研究热点之一。显著性可理解为一种注意力机制,将显著性图像与热红外图像进行融合能够突出场景中显著性目标[14]。赵鹏鹏等[21]利用融合局部熵对红外弱小目标进行粗定位,再利用改进的视觉显著性检测方法获得感兴趣区域的显著图,最后利用阈值分割提取红外弱小目标。赵兴科等[14]采用BASNet生成热红外图像的显著图进行图像增强,并基于轻量化网络YOLOv3-MobileNetv2实现机载红外目标检测。本文使用深度显著性目标检测网络U2-Net[15]生成热红外图像的显著性图,并在第3章对结果进行评估。
2. 本文算法
针对红外航拍图像存在的检测目标小、图像纹理少、对比度弱的问题,本文主要研究融合视觉显著性的红外航拍行人检测。本章首先分析YOLOv4基准模型,然后分析针对红外航拍场景的锚框重聚类,最后重点介绍生成热红外图像显著图网络U2-Net以及两种显著图融合方式。
2.1 YOLOv4目标检测算法
YOLOv4基于YOLOv3,分别在网络的输入端、主干网络、颈部网络、输出端引入先进方法进行改进,在检测精度上显著提升,实现速度和精度的平衡。
1)输入端:采用Mosaic、CutMix等数据增强方式进行预处理,提高训练速度和检测精度。采用自抗扰训练和CmBN(Cross-Iteration mini-Batch Normalizartion)提升网络泛化性。
2)主干网络:提出基于密集连接结构和CSP(Cross Stage Partial)的新主干CSPDarknet53来提取特征。
3)颈部网络:用于多尺度特征提取。采用SPP(Spatial Pyramid Pooling)和PANet(Path Aggregation Network)结合的方式替代之前的特征金字塔(Feature Pyramid Network, FPN))作为特征融合网络。能够在仅增加少量推理时间的同时显著提升检测精度。
4)输出端:又称检测头,输出最终检测结果。YOLO的输出主要分为3部分:边界框位置信息、边界框置信度、目标分类信息。YOLOv4采用CIOU(Complete-IOU))损失函数,并在预选框筛选阶段采用DIOU_NMS代替原始NMS,提升检测精度。
YOLOv4-tiny是通过减少YOLOv4主干和颈部中CSP结构、去掉SPP结构、减少输出头优化设计的轻量级网络。针对单类别行人检测,本文采用的YOLOv4-tiny结构如图 1所示。
2.2 基于K-Means的锚框重聚类
自YOLOv2开始,YOLO将锚框作为先验知识加入到边界框回归中,YOLOv4边界框回归公式如下:
$$ \begin{array}{l} {b_x} = \sigma ({t_x}) + {c_x} \hfill \\ {b_y} = \sigma ({t_y}) + {c_y} \hfill \\ {b_w} = {p_w}{{\text{e}}^{{t_w}}} \hfill \\ {b_h} = {p_h}{{\text{e}}^{{t_h}}} \hfill \\ \end{array} $$ (1) 式中:bx、by是边界框的中心点位置坐标;bw、bh是边界框的宽、高。如图 1所示,YOLO通过网络训练获得边界框参数。其中tx,ty是边界框相对特征图网络单元格左上角坐标的偏移量;cx、cy是特征图网络单元格左上角坐标;tw、th是相对锚框的缩放比例;pw、ph是从数据集中聚类的锚框。
高质量的锚框设计可提升检测效果[20]。YOLOv4-tiny中原始锚框尺寸适用于尺度变化较大的场景,针对航拍场景,需要对锚框大小重新设计。锚框聚类采用K-Means算法,并采用交并比(Intersection of Union, IOU)度量[8],公式为:
$$ d(\text { box }, \text { anchor })=1-\operatorname{IOU}(\text { box, anchor })$$ (2) 2.3 U2-Net生成显著图
无人机航拍行人目标与地面视角的行人目标存在一定差异,由于拍摄角度不同,航拍图像中的行人目标边界几何特性相对较弱。U2-Net[15]是针对显著性目标检测设计的先进网络,能够捕捉不同尺度上下文信息,可有效提取图像中的显著性目标。
U2-Net[15]是基于encoder-decoder结构设计两层嵌套U形网络,整体结构如图 2所示。底层设计了RSU(residual U-block)结构,顶层设计了“U”形网络,整体由不同层数的RSU模块所组成,这种嵌套U结构在提取多尺度特征上表现良好,同时在聚合阶段的多层次特征上也有较好的表现,且不需要预训练网络进行迁移学习,灵活性强。另外,加深模型U2-Net可获得更高的分辨率,且不会显著增加内存和计算成本。
U2-Net中使用了一种新的残差子块RSU模块(residual U-block),结构如图 3所示。RSU模块中,L表示编码器中的层数,M表示RSU中间层的通道数,输入通道数与输出通道数分别用Cin与Cout表示。编码器中的层数越大,对大尺度信息的处理能力越强。RSU结构也是一个小型的U型结构,能实现不同尺度感受野特征信息的融合,提升网络性能。
利用U2-Net生成显著图实例如图 4所示,在多种复杂场景下,显著图均能提取出行人目标,因此,可利用显著图融合热红外图像进行图像增强。
2.4 显著图融合增强热红外图像
红外航拍数据集ComNet[22]将单通道的热红外图像转换为RGB格式的三通道伪彩色图像,转换方式依据冷暖色调平滑渐变。通过U2-Net获得显著图后,采用两类图像融合方案。
方案一通道替换:如图 5所示,对三通道伪彩色图像进行通道替换,依次使用显著图替换3个通道生成新的融合图像。
方案二加权融合:将显著图与转化后的伪彩色图像进行加权融合,得到增强图像,如图 6所示。加权融合不仅保留了图像中的纹理信息,且使得图像中的行人目标区域更加显著。
3. 实验
3.1 数据集与评价指标
实验使用ComNet数据集[22],该数据集由大疆无人机DJIM600 PRO搭载FLIR热红外相机Vue Pro采集不同时期不同场景下的行人热红外图像数据,无人机飞行的高度为20~40 m,图像分辨率为640×512。部分实例如图 7所示。
该数据集包含多个场景,例如运动场、校园、中午行人密集的食堂入口以及夜间行人稀少的走廊。为了保证模型的有效性,训练集和测试集使用了不同场景下采集的热图像。从数据集中提取仅包含行人目标的热红外图像,训练集包括819张图像,其中包括3130个行人实例,测试集包括80张图像,其中包括407个行人实例[22]。
为对行人目标的检测结果进行评估,本文使用评价指标包括:精确率(Precision)、召回率(Recall)和平均精度(Average Precision, AP)评价指标。AP50表示设置IOU阈值为0.5时,类别的AP值[14]。
3.2 实验环境
实验平台操作系统为Windows10,CPU为Intel i7-8750H(2.2 GHz),GPU为NVIDIA GTX1060GPU、16G内存。采用PyTorch深度学习框架,开发环境为Python 3.8.0,CUDA11.1。
设置训练次数为100 epoch,设置输入网络的图片大小为416×416,学习率为0.001,batch_size为8。
3.3 实验结果与分析
3.3.1 K-Means锚框重聚类
为提高检测精度,利用K-Means算法对数据集的锚框重新聚类,得到6组锚框数据,如表 1所示。重聚类的anchor与数据集的平均IOU较原始anchor提高了32.76%。基于融合显著图和YOLOv4-tiny,经过anchor聚类后的模型精度增加了0.3%,说明精确的锚框设计,能有效提高检测精度。
表 1 K-Means锚框聚类结果Table 1. The results of anchor box re-clusteredModels Anchor Box IOU/% YOLOv4-tiny (10, 14) (23, 27) (37, 58)
(81, 82) (135, 169) (344, 319)49.32% Ours (14, 39) (21, 69) (26, 95)
(38, 85) (33, 113) (45, 130)82.08% 3.3.2 U2-Net显著图融合分析
文献[14]中证明了BASNet作为显著图提取网络的有效性。类似地,U2-Net对热红外图像进行处理,提取出行人目标,并将其处理为二值掩膜图像的形式输出。为评估U2-Net显著图提取的有效性,为后续图像融合方式研究提供有力支撑,选择典型YOLOv3和YOLOv4-tiny算法为基础,将U2-Net和BASNet生成的显著图进行不同数据融合方式对比。
如表 2所示,对比BASNet和U2-Net提取的显著图在不同数据融合方式上效果,无论基于YOLOv3还是YOLOv4-tiny,U2-Net提取的显著图效果明显优于BASNet,能挖掘更多上下文信息。
Data fusion method Salient map extraction method AP50/% YOLOv3 YOLOv4-tiny Original infrared image - 88.8 88.6 Salient map - 77.1 75.6 R channel replaced BASNet 92.7 91.7 U2-Net 94.7 93.7 G channel replaced BASNet 93.8 91.1 U2-Net 94.2 94.7 B channel replaced BASNet 90.5 91.5 U2-Net 92.4 92.9 Weighted fusion BASNet 94.4 92.0 U2-Net 95.3 94.8 如表 2所示,YOLOv4-tiny在原始热红外数据集的AP值为88.6%,在显著图数据上AP值为75.6%,表明显著图图像具有一定的有效信息,但U2-Net提取的显著图仅为二值掩膜图像,原始红外图像比显著图图像具有更多的纹理信息。通道替换的数据融合方式都可提高行人检测精度,替换R、G、B通道分别比基准模型AP值增加了5.1%,6.1%和4.3%。显然面向低对比度的红外图像,替换显著图通道的方式能够增加图像对比度,提升检测效果。同样,加权融合的方式AP值增加了6.2%,即加权融合方式效果优于通道替换,说明加权融合可使用更多的信息。表明了融合热红外图像与显著图的数据增强方法对行人目标检测的有效性,通过加权融合方式进行数据融合比通道替换数据融合表现更好。
图 8是基于YOLOv4-tiny采用不同融合方式的推理实例。显然,使用热红外图像与显著图融合后的图像能够明显增强目标显著性。针对多个场景的行人目标检测,增强后的图像比单独使用热红外图像效果更好,原热红外图像中存在明显漏检,融合显著图进行增强后,行人漏检情况明显改善。同时,不同的通道替换方式与融合方式对行人目标检测结果的影响也不相同,通过替换G通道进行图像融合在目标置信度上优于其他通道替换融合方式。图 8中,通过加权融合方式检测行人目标比通道替换检测目标框更准确,置信度更高,例如在目标较多的场景(图 8(c))中,加权融合方式可检测出右下角的两个行人目标,明显改善漏检情况。
3.3.3 与先进目标检测器的对比
为进一步验证本文图像显著图加权融合方式的有效性,将本文融合算法与IRA-YOLOv3[23]、赵兴科等[14]提出的方法、YOLOv3等几种先进红外目标检测算法在ComNet数据集[22]的表现以及模型体积进行对比,实验结果如表 3所示。
表 3 与先进目标检测器的对比Table 3. Comparison of advanced object detectors由表 3可见,本文方法在精度上相比于IRA-YOLOv3[23]和赵兴科等[14]提出的方法分别高10.9%、6.0%。在模型体积的对比上,本文方法相比于IRA-YOLOv3多12.4MB,但精度上明显占优。且对YOLOv3、YOLOv3-tiny和YOLOv4-tiny等典型算法,通过显著图加权融合方式进行数据增强相比于原始算法在精度上分别提升了6.5%、7.6%和6.2%,表明本文所设计融合方法的有效性。说明加权融合进行热红外图像数据增强的方式在面向红外航拍场景数据是有效的,对其他场景具有一定的参考意义。
YOLOv4-tiny相比之前的YOLOv3、YOLOv3-tiny算法在运行速度上占优[1]。相比YOLOv4-tiny算法在热红外图像的表现,在显著图加权融合后的AP值增加了8.8%。可获得更有利于边缘设备部署的检测模型。
4. 结束语
综上所述,为了解决红外航拍图像存在目标尺寸小、纹理信息少、图像对比度弱的问题,本文提出了一种融合视觉显著性的红外航拍场景行人检测方法。该算法以YOLOv4-tiny作为基础,通过重聚类锚框的方式使得检测器获得更好的效果,并利用U2-Net网络提取热红外图像显著图,通过像素级加权融合方式对热红外图像进行数据增强。基于公开航拍数据集,实验验证了本文方法能够有效提升多种典型检测算法的精度。
-
![]()
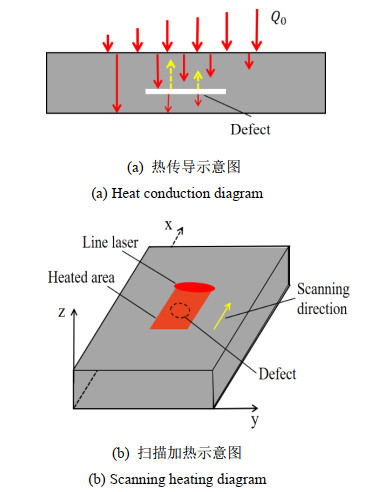
图 1 线激光扫描检测原理示意图
Figure 1. Schematic diagram of linear laser scanning inspection principle
![]()
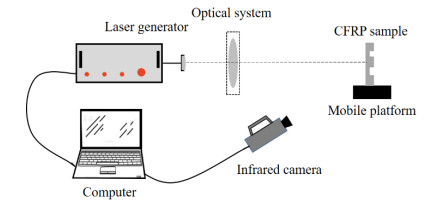
图 3 激光扫描热成像无损检测系统
Figure 3. Diagram of laser scanning thermal imaging non-destructive testing system
![]()
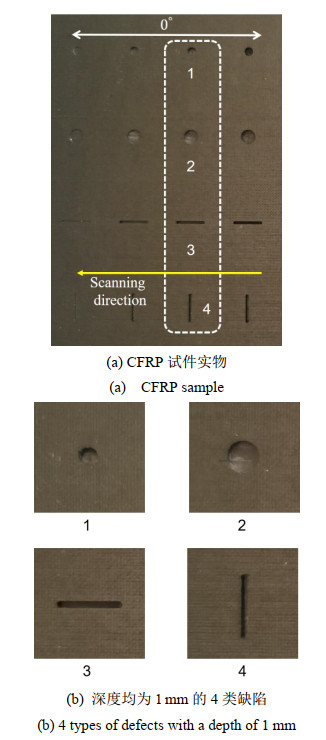
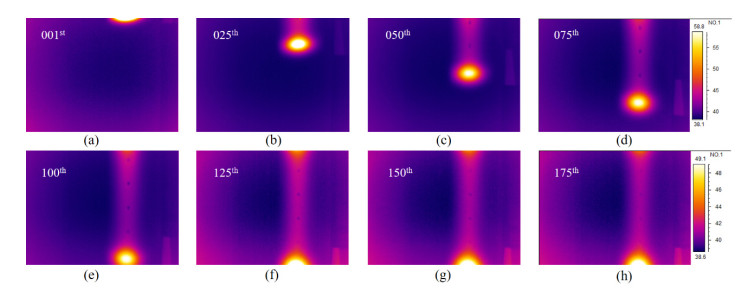
图 4 3 mm圆盘形孔激励过程的序列图像
Figure 4. Sequential images of 3 mm disc-shaped hole in the excitation process
![]()
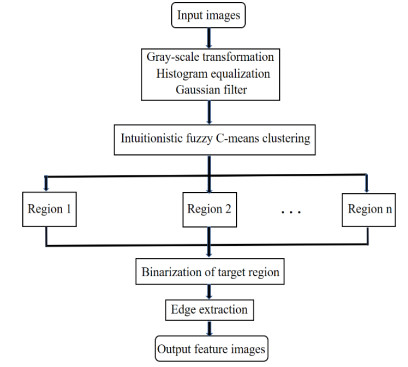
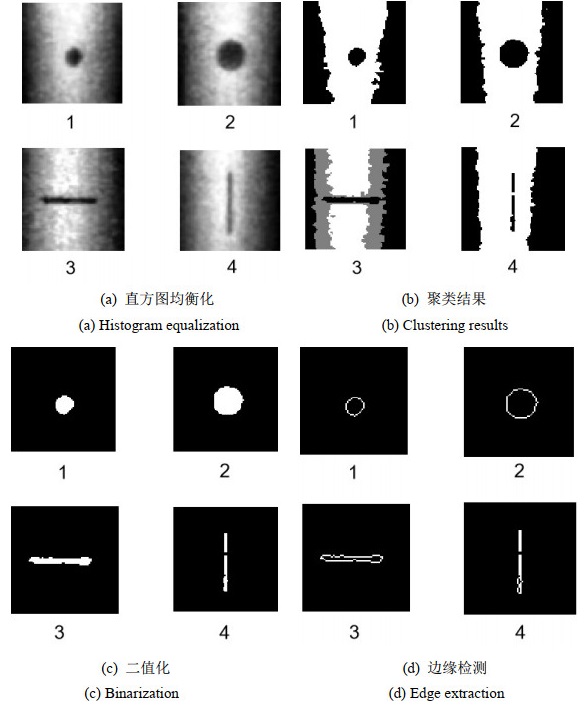
图 6 IFCM算法缺陷特征提取流程
Figure 6. Flow chart of defect feature extraction in IFCM algorithm
表 1 T800型CFRP热特性
Table 1 Thermal properties of T800 CFRP
Properties Parameters Density ρ/(kg/m3) 1536 Specific heat capacity c/(J/(kg·K)) 865 Thermal conductivity k/(W/(m·K)) 4.2
(Along fiber direction)
0.56
(Perpendicular to fiber direction) 下载: 导出CSV
下载: 导出CSV
-
[1] 张晓虎, 孟宇, 张炜. 碳纤维增强复合材料技术发展现状及趋势[J]. 纤维复合材料, 2004(1): 50-53. https://www.cnki.com.cn/Article/CJFDTOTAL-QWFC200401015.htm ZHANG Xiaohu, MENG Yu, ZHANG Wei. The state of the art and trend of carbon fiber reinforced polymer[J]. Fiber Composite, 2004(1): 50-53. https://www.cnki.com.cn/Article/CJFDTOTAL-QWFC200401015.htm
[2] 王扬, 李科, 刘俊岩. CFRP复合材料层板缺陷的红外热波成像检测方法[J]. 航空制造技术, 2016(4): 36-42. https://www.cnki.com.cn/Article/CJFDTOTAL-HKGJ201604008.htm WANG Yang, LI Ke, LIU Junyan. Defect detection method of CFRP composite lamina-tes by infrared thermal wave imaging[J]. Aeronautical Manufacturing Technology, 2016(4): 36-42. https://www.cnki.com.cn/Article/CJFDTOTAL-HKGJ201604008.htm
[3] 李晓丽, 金万平, 张存林, 等. 红外热波无损检测技术应用与进展[J]. 无损检测, 2015(6): 19-23. https://www.cnki.com.cn/Article/CJFDTOTAL-WSJC201506005.htm LI Xiaoli, JIN Wanping, ZHANG Cunlin, et al. The application and progress of infrared thermal wave nondestructive detection technology[J]. Nondestructive Testing, 2015(6): 19-23. https://www.cnki.com.cn/Article/CJFDTOTAL-WSJC201506005.htm
[4] 杨晓. 基于红外热波技术的大尺寸复合材料缺陷检测研究[D]. 成都: 电子科技大学, 2021. YANG Xiao. A Research On Defect Detection of Large-Scale Composite Materials Based on infrared Thermal Wave Technology[D]. Chengdu: University of Electronic Science and Technology of China, 2021.
[5] 朱笑, 袁丽华. 基于红外热成像的碳纤维增强树脂复合材料低速冲击损伤表征[J]. 复合材料学报, 2022, 39(8): 4164-4171. ZHU X, YUAN L H. Low-velocity impact damage characterization of CFRP based on infrared thermography[J]. Acta Materiae Compositae Sinica, 2022, 39(8): 4164-4171.
[6] FENG Q Z, GAO B, LU P, et al. Automatic seeded region growing for thermo-graphy debonding detection of CFRP[J]. NDT & E International, 2018, 99: 36-49.
[7] Sreeshan K, Dinesh R, Renji K. Enhancement of thermographic images of composite laminates for debond detection: an approach based on Gabor filter and watershed[J]. NDT & E International, 2019, 103: 68-76.
[8] Ogasawara N, Ban A, Yamada H, Kojima R. Paint delamination inspection for light buoys by infrared thermography with distance heating[J]. Adv. Experim. Mech. , 2016(1): 167-172.
[9] Masashi Ishikawa, Masaki Ando, Masashi Koyama, et al. Active thermographic inspection of carbon fiber reinforced plastic laminates using laser scanning heating[J]. Composite Structures, 2019, 209: 515-522.
[10] 丁超. 碳纤维材料红外热波无损检测技术研究[D]. 北京: 中国科学院大学, 2021. DING Chao. Research on Infrared Thermal Wave Nondestructive Testing Technology of Carbon Fiber Materials [D]. Beijing: University of Chinese Academy of Sciences, 2021.
[11] 汪权, 张志杰, 陈昊泽, 等. 线激光扫描的碳纤维复合材料表面损伤研究[J]. 激光与红外, 2022, 52(3): 458-464. https://www.cnki.com.cn/Article/CJFDTOTAL-JGHW202203023.htm WANG Quan, ZHANG Zhijie, CHEN Haoze, et al. Study on surface damage of carbon fiber composites based on line laser scanning[J]. Laser & Infrared, 2022, 52(3): 458-464. https://www.cnki.com.cn/Article/CJFDTOTAL-JGHW202203023.htm
[12] 梅晨. 热障涂层结构缺陷脉冲红外热波无损检测技术研究[D]. 哈尔滨: 黑龙江科技大学, 2016. MEI Chen. Research on the Technology of Thermal Barrier Coating Structure Defects Detection Using Pulsed Infrared Thermal Wave Non-Destructive Testing Method[D]. Harbin: Heilongjiang University of Science and Technology, 2016.
[13] 孙长友. 工程扫描仪滑架部件力学特性和热特性分析[D]. 西安: 西安电子科技大学, 2008. SUN Changyou. Analysis of Mechanics Characteristic and Thermal Characteristic of Engineering Scanner's Carriage Part[D]. Xi'an: Xidian University, 2008.
[14] GUO X W, XU W H. Comparative study on pulsed thermography and modulated thermography of composite honeycomb panels[J]. Acta Materiae Compositae Sinica, 2012, 29(2): 172-179.
[15] Fiat A, Shamir A. How to prove yourself: practical solution to identification and signature problems[C]//Advances in Cryptology-CRYPTO, 1987: 186-194.








计量
- 文章访问数: 131
- HTML全文浏览量: 31
- PDF下载量: 26
