
Temperature and Pressure Compensation Algorithm of Laser Oxygen Partial Pressure Sensor Based on BP Neural Network
-
摘要:
针对可调谐半导体激光吸收光谱(Tunable Diode Laser Absorption Spectroscopy, TDLAS)技术在密闭空间中测量氧分压时受温度和压力的影响,本文提出了基于BP神经网络的激光氧分压传感器温压补偿算法来消除温度和压力对氧分压测量的影响。采用模拟电路构建了激光氧分压传感器,并通过电连接器上传测量的二次谐波峰值、温度和压力值至上位机,上位机通过BP神经网络温压补偿算法进行温压补偿,获取准确的氧分压值。实验结果表明,该算法可以实现对测量的氧分压补偿,补偿后氧分压测量误差小于±1 kPa,能满足航天、航空等领域的要求,具有较好的应用前景。
Abstract:Considering the influence of temperature and pressure on the measurement of the partial pressure of oxygen using TDLAS technology, a temperature and pressure compensation algorithm for laser oxygen partial pressure sensors is proposed for eliminating these effects. The laser oxygen partial pressure sensor was constructed using an analog circuit, and the measured second-harmonic peak, temperature, and pressure values were uploaded to the master computer through an electrical connector, which performed temperature and pressure compensation using the BP neural network temperature and a pressure compensation algorithm to obtain accurate oxygen partial pressure values. The experimental results show that the algorithm can achieve compensation for the measured partial pressure of oxygen, and that the error of the partial pressure of the oxygen measurement is less than ±1 kPa, which meets the requirements of aerospace, aviation and other fields, and has a desirable application prospect.
-
Keywords:
- BP neural network /
- TDLAS /
- oxygen partial pressure /
- temperature-pressure compensation /
- WMS
-
0. 引言
作用距离是红外成像探测系统最重要的评估指标之一,它与目标的辐射强度、背景的辐射亮度、大气透过率、探测器的性能等多种因素有关。早期的作用距离评估方程主要有R. D. 小哈德逊作用距离方程[1]、基于NETD(Noise Equivalent Temperature Difference,噪声等效温差)的作用距离方程[2-4],基于MDTD(Minimum Detectable Temperature Difference,最小可探测温差)的作用距离方程[2]、基于对比度的作用距离方程等[4]。当前的作用距离评估模型则同时考虑目标、探测设备和大气环境的相互作用,对于点目标探测来说,把以下3个要求作为点目标能否被探测到的基本条件[5-6]:
1)目标在探测器上所成的像元必须具有一定大小,一般要求在单方向上的最小像元个数n在1~3之间;
2)目标在靶面上的照度产生的信噪比SNR(signal-to-noise ratio)要满足一定要求;
3)目标和背景在探测器上的照度必须具有一定的对比度,该对比度满足信号检测和处理所需要的最低对比度。
根据以上要求进行作用距离评估时,一般是先根据预想的大气环境条件和观测条件,设定目标到探测设备的距离R,利用LOWTRAN或MODTRAN软件计算平均大气透过率,再根据评估模型计算以上3个条件,如果满足,说明还不到最远作用距离,增大R进一步计算,直到其中有一个条件不满足为止,则此时得到的R值就是最远作用距离。如果初始设定的R值较大,不满足3个条件,则减小R直到3个条件都满足为止。以上方法可以手工计算,也可以通过编程方法自动计算,后者的效率大大提高。文献[7-8]利用编程方法调用MODTRAN软件逐步计算,得到作用距离。但在此方法中,采用通常的固定步长方法,步长太大,则最终的计算精度不够;步长太小,则计算速度较慢。下面采用的变步长方法有效地解决了计算精度和速度之间的矛盾,大大提高了计算效率。
1. 作用距离评估方程
1.1 目标像斑大小计算
不考虑弥散时,目标在焦平面上的像斑大小d0可用下式表示:
$$ {d_0} = l \cdot f/R $$ (1) 式中:l是目标线度;f是光学系统焦距;R是目标到探测设备的距离。实际的目标成像大小与多种因素有关,主要包括系统对目标的夹角、仪器的振动、跟踪平稳情况、光学系统的弥散、大气湍流的弥散、探测器的分辨率等。
1)无弥散时目标的张角σ0
$$ {\sigma _0} = l/R $$ (2) 2)大气抖动在积分时间内引起的角弥散σ1
影响大气抖动造成的像点弥散的主要因素有:大气抖动频率和均方根角值、系统帧积分时间等。总的来说,随波长的增大,弥散斑越小。一般情况下,较好天气下的可见光波段的弥散取值为3"或2"。
3)探测器空间分辨率限制引起的角弥散σ2
$$ {\sigma _2} = a/f $$ (3) 式中:α为单元探测器的尺度。
4)光学系统衍射极限引起的角弥散σ3
$$ {\sigma _3} = 2.44\lambda/D $$ (4) 式中:D为光学系统口径。
5)积分时间内跟踪系统抖动造成的角弥散σ4
$$ {\sigma _4} = \omega/(2f) $$ (5) 式中:ω为积分时间内目标在像面上的最大位移。
6)系统总的像斑大小d
考虑弥散情况下,系统总的像斑直径大小为:
$$d = 2f \cdot \tan \left[ {\left( {\sqrt {\sigma _1^2 + \sigma _2^2 + \sigma _3^2 + \sigma _4^2} + {\sigma _0}} \right)/2} \right]$$ (6) 7)像斑所占像元个数n
$$ n = d/a $$ (7) 在实际应用中,主要考虑目标短边所成的像元个数。
1.2 信噪比计算
信噪比反映目标在探测器上的信号和探测器本身的噪声的相对强度,信噪比SNR可表示为[1-2]:
$${\rm{SNR}} = \frac{{{D^ * } \cdot {E_0} \cdot {A_{\rm{d}}}}}{{\sqrt {\Delta f \cdot {A_{\rm{d}}}} }}$$ (8) 式中:D*是红外探测系统的探测率;E0是点目标在探测器上的辐照度;Ad是单个像素的面积;Δf是系统的带宽。一般情况下,D*、Ad和Δf作为系统参数给出,E0则需要经计算给出,它的计算公式为:
$${E_0} = \frac{{{I_0} \cdot {A_{{\rm{op}}}} \cdot {\tau _{{\rm{op}}}} \cdot \tau }}{{{R^2} \cdot {A_{\rm{m}}}}}$$ (9) 式中:I0是目标辐射强度;Aop是光学系统接收面积;τop是光学系统透过率;τ是大气平均透过率;Am是目标在探测器上成像的面积。在这些参数中,Aop和τop是系统参数,τ可以由LOWTRAN或MODTRAN计算给出,Am可以通过计算目标长边和短边在探测器上所成像斑大小的乘积得到,I0可由下式计算得到:
$${I_0} = \varepsilon \cdot {A_0} \cdot {M_0}/{\rm{ \mathsf{ π} }}$$ (10) 式中:ε是目标的发射系数;A0是目标的有效辐射面积;M0是目标在工作波长λ1~λ2内的黑体辐射出射度,它可通过对普朗克公式积分得到:
$${M_0} = \int_{{\lambda _1}}^{{\lambda _2}} {\frac{{2{\rm{ \mathsf{ π} }}{c^2}}}{{{\lambda ^5}}}} \frac{h}{{{{\rm{e}}^{hc/\lambda kT}} - 1}}{\rm{d}}\lambda $$ (11) 式中:h是普朗克常数;c是光速;k是玻尔兹曼常数;T是目标的温度。对于气动加热的物体,表面温度可由下式计算[1]:
$$T = {T_0}\left[ {1 + r\left( {\frac{{\gamma - 1}}{2}} \right){M^2}} \right] $$ (12) 式中:T0是周围大气的温度;r是恢复系数,对于层流,r=0.82;对于紊流,r=0.87。γ取1.4,M是目标运动的马赫数。
1.3 调制对比度计算
调制对比度反映目标和天空背景在探测器上辐照度的相对比值,它可表示为:
$${C_{\rm{M}}} = \frac{{{E_0} - {E_{{\rm{bg}}}}}}{{{E_0} + {E_{{\rm{bg}}}}}} $$ (13) 式中:Ebg是天空背景在探测器上的辐照度,其计算公式为:
$${E_{{\rm{bg}}}} = {L_{{\rm{bg}}}} \cdot {A_{{\rm{op}}}} \cdot {\tau _{{\rm{op}}}}/{f^2}$$ (14) 式中:Lbg是天空背景辐亮度,它可由LOWTRAN或MODTRAN计算给出,但两者给出的值是特定地区天空背景辐亮度的年平均值,无法反映Lbg随太阳高度角以及复杂多变的大气条件等的变化情况[9-10],所以有条件的话,可以用天光光学辐射特性测量设备进行实际测量。
2. 算法实现
在程序设计上,采用Matlab或VC进行界面设计,采用Matlab的优点是可以直接调用其积分函数integral,对普朗克公式积分得到目标的辐射出射度。在界面上输入目标、探测设备的参数,在LOWTRAN或MODTRAN的接口界面中输入大气模式等参数。LOWTRAN7的光谱分辨率为20 cm-1,MODTRAN的光谱分辨率提高到1 cm-1。下面以Matlab调用MODTRAN为例说明程序设计方法。
2.1 Matlab与MODTRAN的接口
主程序与MODTRAN软件的数据交换是通过MODTRAN软件的tape5和tape6文件实现的。在MODTRAN软件的输入界面上选择相应的选项后,MODTRAN会生成一个tape5文件,其中包含了用户输入的各种选项的格式化数据。在执行MODTRAN软件时,MODTRAN调用tape5中的数据进行计算,得到大气透过率和天空辐亮度等数据,保存在tape6文件中。
主程序与MODTRAN软件的接口之一是读取tape6中的大气平均透过率和天空背景辐亮度数据,为此,需要在MODTRAN软件的运行模式(Execution mode)中选择“Thermal Radiance”选项,这样,MODTRAN会同时计算大气透过率和天空背景辐亮度。这两个数据在tape6文件的最后部分,如图 1所示,需要想办法从文本文件中把它们提取出来。
程序设计方法是把tape6中从文件结束前的1000个字符读入一个字符串数组中,再利用字符串比较命令strcmp来逐一比较字符串数组中的元素,如果连续找到3个字符串“AVERAGE”、“TRANSMITTANCE”和“=”,则其后的一个字符串就是大气平均透过率的值。同样,如果连续找到4个字符串“INTEGRATED”、“TOTAL”、“RADIANCE”和“=”,则其后的一个字符串就是天空背景辐亮度的值。
在读取tape6文件时要注意的是,一定要等到tape6中的数据生成后再读取。由于MODTRAN在运行时,是先删除旧的tape6文件,再生成新的tape6文件,所以程序有可能在MODTRAN运行时读到空字符串。为此,程序设计了两重防读空措施,一是在读取tape6时,先判断tape6文件是否存在,如果不存在,则一直等待。二是读取数据后,先判断字符串数组是否为空,如果为空则继续等待。程序代码如下:
while(~exist('tape6', 'file'))
end
fp=fopen ('tape6', 'r');
fseek (fp, -1000, 'eof');
while(1)
str=textscan(fp, '%s');
if (~isempty(str))
break;
end
end
fclose(fp);
主程序与MODTRAN软件的另一个接口是改写tape5文件中的R值,即目标与探测设备的距离。改写的方法是把tape5文件读入到一个字符串数组中,删去原tape5文件,把对应R值的元素值改写后再按格式写入到新的tape5文件中。另一个更简单的方法是先用试探法找到R值在文件中的位置,然后直接在此处写入新的R值即可。例如,假设R值在距文件结尾处前112个字符处,则可用以下代码实现:
fp=fopen('tape5', 'r+');
fseek(fp, -112, 'eof');
fprintf(fp, '%7.3f', R/1000);
fclose(fp);
由于tape5中的距离以km为单位,所以R值在写入前要先转换一下。
2.2 变步长的循环算法设计
程序运行时,先设定一个较小的R值,计算3个约束条件,如果满足,则每次加一个较大的步长。例如初次步长设为100 km,等到其中一个约束条件不满足时,则反向减小步长,第二次的步长可设为25 km。等到再次满足条件时,完成了程序的一次循环,此时作用距离的精度是25 km。然后再执行一次循环,正向步长设为5 km,反向步长设为1 km,作用距离的精度即为1 km。如果想进一步提高精度,多执行几次循环即可,每次循环的步长都逐步减小,直到满足需要的精度要求为止。程序设计流程图如图 2所示。
![]() 图 2 变步长的一次循环计算程序框图Figure 2. Program diagram for variable step length loop calculation
图 2 变步长的一次循环计算程序框图Figure 2. Program diagram for variable step length loop calculation要注意的是,Matlab程序在用while语句进行循环运行时,GUI界面中编辑框的数据不更新显示。而为了监视程序中间的运行结果,又需要观察每次循环计算时像元个数、信噪比和调制对比度的变化情况,因此需要在输出显示代码后,加一条延时程序,延时时长为1 ms即可,以不影响程序运行速度,具体代码如下:
set(handles.edit14, 'string', R/1000);
set(handles.edit15, 'string', n);
set(handles.edit16, 'string', SNR);
set(handles.edit17, 'string', Cm);
pause(0.001);
其中的pause语句起到延时作用,这样,GUI编辑框中的数据即可正常更新显示。此外,Matlab在调用MODTRAN程序时,为了不对GUI的显示界面造成干扰,需要MODTRAN程序以后台方式运行,可执行以下代码实现:
system('mod4.exe', '-echo');
3. 运行结果
软件在Matlab中的设计界面如图 3所示。在主程序界面中输入目标参数和设备参数,点击“作用距离计算”按纽,程序就自动运行,并在输出框中显示每次循环计算的中间及最终结果。
变步长循环计算的效率是很高的。假定初始R值为50 km,最终的作用距离值为300 km。采用固定步长计算时,为了达到1 km的精度,需要设定步长为1 km,这样程序需要循环计算250次。采用前述的变步长方法,第一次循环需要3+3=6次,此时R=275 km。第二次循环需要5+5=10次。这样总共只需要16次就可达到所需的精度。程序耗时主要在MODTRAN程序的运行上。假定程序循环计算一次耗时0.5 s,固定步长计算需要耗时125 s,变步长计算只需要8 s。
4. 结论
本文在Matlab环境下结合MODTRAN软件,根据红外成像探测系统评估模型实现了作用距离的自动计算,为红外系统性能评估提供了便利手段。针对固定步长计算耗时较长的不足,采用了变步长的循环计算方法,大大提高了计算效率。
-
![]()
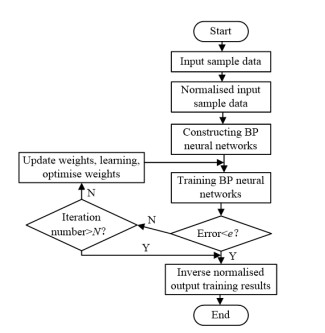
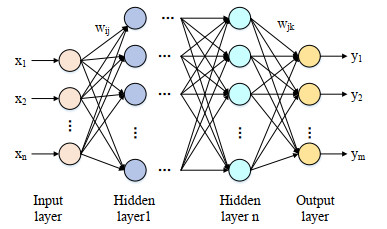
图 2 BP神经网络温压补偿算法流程
Figure 2. Flowchart of BP neural network temperature and pressure compensation algorithm
![]()
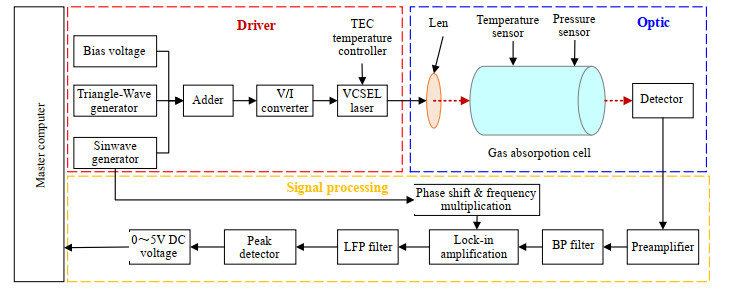
图 3 激光氧分压传感器系统结构
Figure 3. Structure of the laser oxygen partial pressure sensor system
![]()
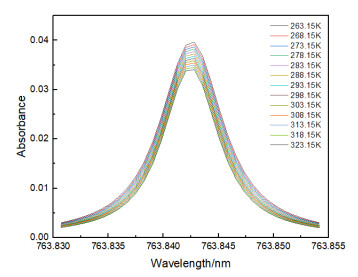
图 4 不同温度下763 nm吸收谱线线型
Figure 4. Line shape of the 763 nm absorption line at different temperatures
![]()
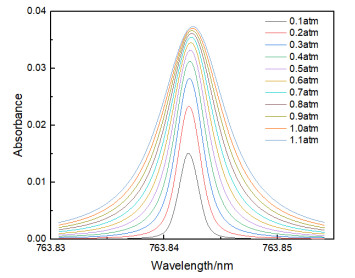
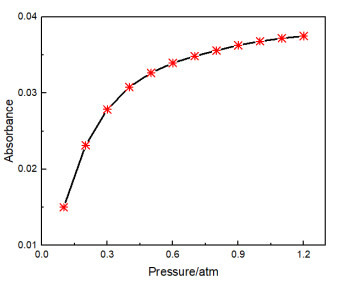
图 6 不同压力下763 nm吸收谱线线型
Figure 6. Line shape of the 763 nm absorption spectrum at different pressures
![]()
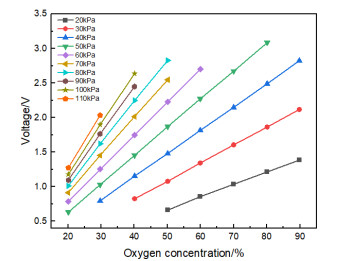
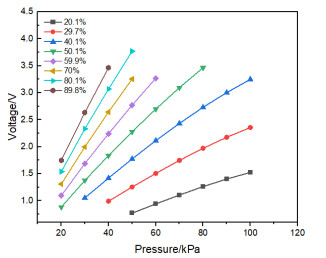
图 8 激光氧分压传感器电压与氧浓度关系
Figure 8. The relationship between voltage and oxygen concentration of laser oxygen partial pressure sensor
![]()
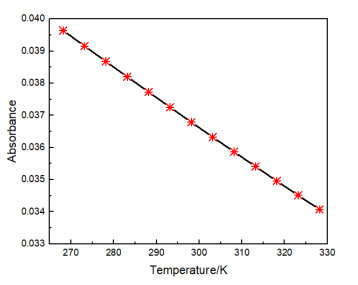
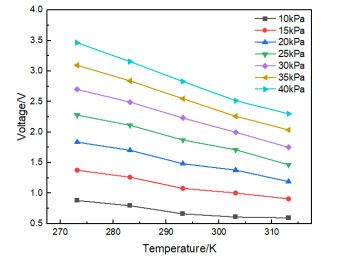
图 9 激光氧分压传感器电压与温度关系
Figure 9. The relationship between voltage and temperature of laser oxygen partial pressure sensor
![]()
图 10 激光氧分压传感器电压与压力关系
Figure 10. The relationship between voltage and pressure of laser oxygen partial pressure sensor
![]()
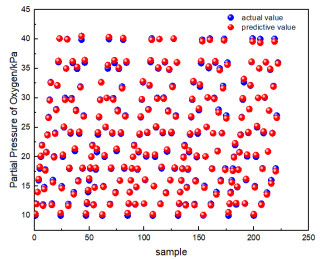
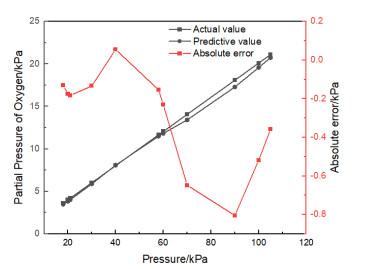
图 11 BP神经网络补偿算法训练结果
Figure 11. The results of BP neural network compensation algorithm training
-
[1] 张旭, 郭腾霄, 杨柳, 等. 基于近红外TDLAS检测技术的甲烷浓度场重建研究[J]. 红外技术, 2018, 40(6): 603-611. http://hwjs.nvir.cn/article/id/hwjs201806014 ZHANG X, GUO X T, YANG L, et al. Reconstruction of methane concentration field based on near-infrared TDLAS detection technique[J]. Infrared Technology, 2018, 40(6): 603-611. http://hwjs.nvir.cn/article/id/hwjs201806014
[2] 陈剑虹, 孙超越, 林志强, 等. 基于TDLAS技术的CO2浓度检测方法研究[J]. 电子测量与仪器学报, 2022, 36(6): 229-235. CHEN J H, SUN C Y, LIN Z Q, et al. Research on CO2 concentration detection method based on TDLAS technology[J]. Journal of Electronic Measurement and Instrumentation, 2022, 36(6): 229-235.
[3] 赵成龙, 黄丹飞, 刘智颖, 等. 开放型TDLAS-WMS技术CO2痕量气体检测[J]. 光子学报, 2022, 51(2): 333-342. ZHAO C L, HUANG D F, LIU Z Y, et al. Open TDLAS-WMS technology for CO2 trace gas detection[J]. Journal of Photonics, 2022, 51(2): 333-342.
[4] 甄杨. 基于TDLAS逃逸氨检测系统压力影响的研究[J]. 自动化与仪表, 2019, 34(7): 44-47. ZHEN Y. Study on the pressure effect of fugitive ammonia detection system based on TDLAS[J]. Automation and Instrumentation, 2019, 34(7): 44-47.
[5] 申凯. 负压下甲烷浓度非线性压力补偿模型[J]. 煤炭技术, 2018, 37(4): 161-163. DOI: 10.13301/j.cnki.ct.2018.04.063 SHEN K. Nonlinear pressure compensation model for methane concentration under negative pressure[J]. Coal Technology, 2018, 37(4): 161-163. DOI: 10.13301/j.cnki.ct.2018.04.063
[6] ZHU X, YAO S, REN W, et al. TDLAS monitoring of carbon dioxide with temperature compensation in power plant exhausts[J]. Applied Sciences, 2019, 9(3): 442. DOI: 10.3390/app9030442
[7] Alorifi F, Ahmed Ghaly S M, Shalaby M Y, et al. Analysis and detection of a target gas system based on TDLAS & LabVIEW[J]. Engineering, Technology & Applied Science Research, 2019, 9(3): 4196-4199.
[8] 刘媛媛, 刘业森, 郑敬伟, 等. BP神经网络和数值模型相结合的城市内涝预测方法研究[J]. 水利学报, 2022, 53(3): 284-295. LIU Y Y, LIU Y S, ZHENG J W, et al. Research on urban flood prediction method combining BP neural network and numerical model[J]. Journal of Water Resources, 2022, 53(3): 284-295.
[9] 李其真, 徐磊, 张慧, 等. 基于BP神经网络的宽频域特定间谐波优化PWM控制方法研究[J]. 武汉大学学报(工学版), 2022, 55(9): 958-965. LI Q Z, XU L, ZHANG H, et al. Research on the optimal PWM control method based on BP neural network for inter-specific harmonics in wide frequency domain[J]. Journal of Wuhan University (Engineering Edition), 2022, 55(9): 958-965.
[10] 朱菊香, 谷卫, 罗丹悦, 等. 基于PSO优化BP神经网络的多传感器数据融合[J]. 中国测试, 2022, 48(8): 94-100. ZHU J X, GU W, LUO D Y, et al. Multi-sensor data fusion based on PSO optimised BP neural network[J]. China Test, 2022, 48(8): 94-100.
[11] 行鸿彦, 邹水平, 徐伟, 等. 基于PSO-BP神经网络的湿度传感器温度补偿[J]. 传感技术学报, 2015, 28(6): 864-869. DOI: 10.3969/j.issn.1004-1699.2015.06.015 HANG H Y, ZOU S P, XU W, et al. Temperature compensation of humidity sensor based on PSO-BP neural network[J]. Journal of Sensing Technology, 2015, 28(6): 864-869. DOI: 10.3969/j.issn.1004-1699.2015.06.015
[12] 王彪, 连厚泉, 俞泳波, 等. 采用BP神经网络补偿的激光气体检测系统研制[J]. 激光杂志, 2022, 43(8): 19-23. WANG B, LIAN H Q, YU Y B, et al. Development of laser gas detection system using BP neural network compensation[J]. Laser Journal, 2022, 43(8): 19-23.
[13] 靳健. 载人航天器组合体氧分压控制仿真分析[J]. 航天器工程, 2017, 26(1): 50-57. JIN J. Simulation analysis of oxygen partial pressure control of manned spacecraft assemblies[J]. Spacecraft Engineering, 2017, 26(1): 50-57.
[14] 马砺, 范新丽, 张朔, 等. 基于TDLAS技术的CH4气体检测与温度补偿方法[J]. 光谱学与光谱分析, 2021, 41(11): 3632-3638. MA L, FAN X L, ZHANG S, et al. CH4 gas detection and temperature compensation method based on TDLAS technology[J]. Spectroscopy and Spectral Analysis, 2021, 41(11): 3632-3638.
-
期刊类型引用(0)
其他类型引用(1)

 下载:
下载:


计量
- 文章访问数: 28
- HTML全文浏览量: 0
- PDF下载量: 14
- 被引次数: 1
