
Automotive Infrared and Visible Light Image Registration Method
-
摘要:
为了提高车辆视觉感知能力,针对交通场景运用提出一种改进的轮廓角方向(contour angle orientation,CAO)算法用于实现红外与可见光图像配准。通过模拟不同的交通场景,对成熟算法进行性能检测对比,选出CAO算法这一优势算法,并对其粗匹配参数和图像预处理图像缩放程序做了改进。实验表明,改进后的CAO算法细匹配更精准,马赛克拼接图拼接处衔接更加自然,线条更加顺滑,效果更好。与原来CAO算法相比,改进后的算法均方根误差值RMSE下降3.29%,查准率Precision提高2.13%,平均运算耗时减少0.11 s,在配准精度和配准实时性方面均证明了算法的改进效果。
Abstract:To enhance the visual perception of vehicles, an improved contour angle orientation (CAO) algorithm is proposed for the registration of infrared and visible light images in traffic scenes. By simulating different traffic scenarios, a performance comparison was conducted among mature algorithms to select the superior CAO algorithm. Subsequently, improvements were made to the coarse matching parameters and image preprocessing scaling procedure. Experiments demonstrate that the refined CAO algorithm achieves more precise fine matching, thus resulting in mosaic stitching with smoother transitions and lines and yielding better results. Compared with the original CAO algorithm, the improved version reduces the RMSE value by 3.29%, increases the precision value by 2.13%, and decreases the average computation time by 0.11 s, thereby demonstrating improvements in both registration accuracy and real-time performance.
-
0. 引言
线路绝缘子主要承担着连接导体和电气绝缘的功能,是整个电力系统的重要的组成部分[1-3]。由于绝缘子在生产过程中会造成一定的缺陷,以及受到自然环境的影响,绝缘子会自然劣化,绝缘性能不断减弱,绝缘子串的闪络概率将增大,最终造成电网运行的不稳定,而电力事故发生的概率也将增大,给生产生活带来不利的影响。因此绝缘子的定期检测与及时维修对于维护保障电网的安全至关重要[4-5]。
目前主流的低零值(根据DL/T596-1996《电力设备预防性试验规程》中的要求,每片悬式绝缘子的绝缘电阻不应低于300 MΩ,500 kV悬式绝缘子不低于500 MΩ。低于上述水平的,一般就认为是低值或零值绝缘子。)绝缘子检测方法有:光谱法、紫外脉冲法、径向温度法、超声波检测法等。但分析文献,发现不少方法存在危险性高、算法复杂等问题,均需进一步深入研究。由于低零值绝缘子在线路中温度变化明显,目前许多电力公司逐步采用红外成像技术对低零值绝缘子进行检测。然而目前图像处理技术对电力设备进行在线检测的研究面临着图像特征提取的困难,现有算法无法有效解决绝缘子状态检测的多分类问题,且面临处理海量数据检测耗时,检测正确率低的问题。因此,面向大数据的低零值绝缘子检测方法是今后研究的重点。
随着神经网络算法的不断改进,以深度学习为代表的人工智能理论与应用研究越来越多的被应用到故障检测识别中。目前BP(back propagation)神经网络、遗传算法[6]、Petri网络及决策树等不少数据挖掘的方法被成功应用到劣化绝缘子的诊断识别中。支持向量机同样被应用在电力系统的故障诊断领域,然而,直接采用支持向量机模型对绝缘子样本进行检测效果不尽理想。如何优化原有的支持向量机模型,解决大数据环境下绝缘子检测问题,是当下需要着重研究的方向。目前网格搜索法[7]、布谷鸟搜索算法[8]、粒子群算法[9]等等都成功被应用到优化向量机的参数寻优中。灰狼算法与支持向量机相结合应用在诸多领域中,如医学信号识别、植物种类识别、医学图像识别,其实验结果都有所改善,但很少被应用到电气设备故障诊断。本文提出的灰狼优化算法与支持向量机结合针对低零值绝缘子检测识别的应用尚属空白。
本文通过对绝缘子红外图像进行处理,对绝缘子红外图像样本进行多层次深度特征提取用于支持向量机分类识别,并采用灰狼算法实现对支持向量机参数的优化,实现对低零值绝缘子检测识别。
1. 绝缘子串红外图像预处理
1.1 信号绝缘子串红外图像增强
灰度变换增强可以增强红外图像中的目标与背景的对比度,提高图像的质量。灰度变换作为一种应用广泛的图像增强技术可使图像清晰、特征明显[10-12]。
设原图像为f(x, y),其灰度范围为[a, b];变换后的图像g(x, y),其灰度范围线性的扩展至[c, d]。
$$g\left( {x, y} \right) = \frac{{d - c}}{{b - a}}\left[ {f\left( {x, y} \right) - a} \right] + c$$ (1) 图像中大部分灰度级分布在区间[a, b]内,有少许部分在此区间之外,为了改善增强效果,可以令:
$$g\left( {x, y} \right) = \left\{ \begin{array}{l} c \\ \frac{{d - c}}{{b - a}}\left[ {f\left( {x, y} \right) - a} \right] + c \\ d \\ \end{array} \right.$$ (2) 直方图均衡化作为一种应用广泛的图像增强方法,可使绝缘子串同背景对比度增大,方便后期提取绝缘子串。
如图 1所示,直方图均衡化增大了绝缘子串与背景的灰度级,图像的对比度也增强了,这样有利于后期正确分割出绝缘子串和背景。
1.2 基于Ostu算法的图像自适应阈值分割
首先利用最大类间方差法(Ostu)对增强后的绝缘子红外图像进行分割[13],如图 2所示。该方法可自动选取阈值,分割效果好、速度快。
1.3 绝缘子分割
对Ostu分割得到的二值图像进行切割,提取图像中完整的绝缘子串,如图 3所示,为绝缘子缺陷检测智能认知工作做好准备。
1.4 基于Randon变换的图像倾斜校正
运用Ostu算法将绝缘子串的候选区域分割提取后,用Randon变换[14]的图像倾斜校正算法进行绝缘子角度校正,如图 4所示。
2. 灰狼算法支持向量机模型
2.1 支持向量机模型
支持向量机(support vector machine, SVM)是Bell实验室以V. Vapnik教授为首的研究小组针对小样本机器学习方法提出的一种新型模式识别方法[15]。
对于线性不可分的特征向量,需采用核函数将向量投放到高维空间中达到可以分类的效果。高斯径向基核函数作为应用最广泛的核函数,在缺乏样本数据的先验知识时,可通过调整参数取得较好的学习效果。本文采用高斯径向基核函数:
$$K\left( {{x_i}, {x_j}} \right) = {\rm{exp}}\left( { - \frac{{\left\| {{x_i} - {x_j}} \right\|}}{{2{\delta ^2}}}} \right)$$ (3) 式中:δ>0为高斯核的带宽。
设h维的空间上,针对线性可分问题,所有样本均满足约束件:
$${y_i}\left( {{\mathit{\boldsymbol{\omega }}^{\rm{T}}}{X_i} + {\omega _0}} \right) - 1≥0, i = 1, 2, {\rm{L}} $$ (4) 求解支持向量机可转化为分类间隔问题:
$$\mathop {{\rm{min}}}\limits_{\omega , b} \frac{1}{2}{\left\| \mathit{\boldsymbol{\omega }} \right\|^2}$$ (5) 在实际机器学习时,为了允许机器出现一些错分的点,通常在约束条件中加入松弛变量ζ>0,增加一个常数C作为惩罚因子:
$$\mathop {{\rm{min}}}\limits_{\omega , b, \zeta } \left( {\frac{1}{2}{{\left\| \mathit{\boldsymbol{\omega }} \right\|}^2} + C\sum\limits_{i = 1}^h {{\zeta _i}} } \right)$$ (6) 以上问题的求解,可以得到SVM回归表达式:
$$y\left( x \right) = {\rm{sgn}}\left( {\sum\limits_{j = 1}^h {{\alpha _j}{y_j}K\left( {{x_j}, x} \right) - b} } \right)$$ (7) 式中:αj为拉格朗日乘积因子。
2.2 灰狼优化算法
灰狼优化算法(grey wolf optimizer,GWO),是一种通过模拟灰狼捕猎过程中的狩猎和搜索行为建立的全局随机搜索算法。由澳大利亚学者Seyedali. Mirjalili等人在2014年提出的新型算法[16]。GWO算法与粒子群优化算法(particle swarm optimization,PSO)类似,是一个从随机解出最优解的过程。该方法相较于PSO、网格搜索算法(GS)等算法参数少,结构简单,同时又有较强的收敛性,已成功应用于图像处理等领域中。
将最优解设为α,第二个和第三个最佳解分别命名为β和δ,而其余的解均设为ω。狼群通过3只个体狼α、β和δ为初始解带领狼群ω在空间中向猎物(最优解)逼近,经过图 5所示的狼群移动方式,不断迭代,引导狼群不断靠近全局最优解。搜索过程狼群捕食位置更新:
$$D = \left| {C \cdot {X_{\rm{p}}}\left( t \right) - X\left( t \right)} \right|$$ (8) $$X\left( {t + 1} \right) = {X_{\rm{p}}}\left( t \right) - A \cdot D$$ (9) 式中:D为当前灰狼距猎物距离;A和C为系数向量;Xp是猎物的位置向量。
$$A = 2 \cdot a \cdot {r_1} - a$$ (10) $$C = 2 \cdot {r_2}$$ (11) 式中:a随迭代次数从2~0递减;r1,r2是[0, 1]内的随机向量。
为了模拟狩猎行为,假设α,β和δ对猎物的潜在位置有更好的了解,在每次迭代过程中,保留当前最优的α,β和δ解。
$$\left\{ \begin{array}{l} {D_\alpha } = \left| {{C_1} \cdot {X_\alpha }\left( t \right) - X\left( t \right)} \right| \\ {D_\beta } = \left| {{C_2} \cdot {X_\beta }\left( t \right) - X\left( t \right)} \right| \\ {D_\delta } = \left| {{C_3} \cdot {X_\delta }\left( t \right) - X\left( t \right)} \right| \\ \end{array} \right.$$ (12) $$\left\{ \begin{array}{l} {X_1} = {X_\alpha } - {A_1} \cdot {D_\alpha } \\ {X_2} = {X_\beta } - {A_2} \cdot {D_\beta } \\ {X_3} = {X_\delta } - {A_3} \cdot {D_\delta } \\ \end{array} \right.$$ (13) $${X_{\rm{p}}}\left( {t + 1} \right) = \frac{{{X_1} + {X_2} + {X_3}}}{3}$$ (14) 式中:Xα,Xβ和Xδ分别代表α狼,β狼和δ狼当前位置;Dα,Dβ和Dδ分别代表当前狼位置和3只头狼的位置间的距离;A1,A2和A3为随机系数向量;t表示迭代次数。
2.3 GWO-SVM
采用GWO优化算法对绝缘子红外图谱识别的SVM网络核参数惩罚因子C与核宽度δ进行参数优化,以达到图谱分类识别的准确性和泛化能力。
① 输入绝缘子图谱的特征量,选取部分作为SVM的训练集,并将剩余的特征向量集作为测试集,以验证SVM识别的准确率。
② 初始化狼群数量、迭代次数,设置惩罚因子C与核宽度δ的范围。
③ SVM根据初始参数C与δ进行训练和测试,并以错误率最小化为目标。
④ GWO以C与δ为猎物进行优化,达到最大迭代次数时输出GWO全局最优值。
⑤ 将处理后的绝缘子图谱样本分别作为SVM的训练集与测试集。采用最佳参数C与δ建立识别模型,并对测试样本进行预测、分析。
3. 实验结果与分析
3.1 数据描述
为了验证所提出的基于GWO-SVM劣化绝缘子状态检测的可行性,由于目前未建立绝缘子红外图像数据库,我们选取200幅绝缘子图像作为绝缘子样本库。采取随机抽样的方法选取两类样本,其中训练样本120幅,测试样本80幅。所有样本由多位人工分拣专家投票分为完好和低零值两类(如图 6所示)。
3.2 绝缘子检测结果
本文利用灰狼优化算法、粒子群优化算法(random-search)和网格搜索算法(grid-search)对支持向量机参数进行优化。我们对比了3种算法的寻优时间、寻参效率和训练准确率。如表 1所示,灰狼优化算法的各项性能都要比另外两种算法好,其准确率及寻参效率都高于其余两种优化算法。
表 1 参数寻优方法对比Table 1. Comparison of parameter optimization methodsParameter optimization method Accuracy/% Optimization time/s Seeking efficiency/(s/time) Grid-search 91.523 12.693 0.2487 Random-search 92.267 8.159 0.3156 Grey wolf optimizer 95.246 6.251 0.1145 从3种算法优化支持向量机的结果看,网格搜索耗时长且识别准确率低,且寻优时存在复杂度高,运算量大等不足。粒子群优化算法收敛速度快,算法简单,但也存在很明显的缺点,它对于有多个局部极值点的函数,容易陷入到局部极值点中,得不到正确的结果,因此其优化向量机识别的正确率不高。而灰狼优化算法识别准确率可达到95.246%,寻优时间最少且寻参效率高。灰狼算法充分利用先验知识,避免由于惩罚参数过大而导致算法陷入局部最优的风险。因此灰狼优化相比于粒子群搜索算法和网格搜索算法能高效的对低零值绝缘子进行识别。图 7为SVM参数寻优过程。
本文通过网格优化、粒子群优化和灰狼优化这3种优化算法对支持向量机的参数C和δ进行优化。图 8为不同优化算法的故障识别对比。
![]() 图 8 不同优化算法故障识别对比Figure 8. Comparison of fault identification of different optimization algorithms
图 8 不同优化算法故障识别对比Figure 8. Comparison of fault identification of different optimization algorithms通过图 8不同优化算法的识别对比,可以看出GWO-SVM诊断方式相比于GS-SVM和PSO-SVM识别正确率更高。对于图 8分类的结果,结合表 1,GWO-SVM错误识别的绝缘子仅有一个,且GWO寻优时间及寻参效率明显优于GS与PSO,满足预设要求。整个绝缘子串检测系统可以实现有效地对低零值绝缘子进行故障诊断,具有工程实际意义。
4. 结束语
1)本文绝缘子红外图像样本进行了多层次深度特征提取,相比于现有的深度模型提取的特征具有更强的鉴别能力。
2)本文提出红外图像和灰狼算法优化支持向量机相结合的方法实现对低零值绝缘子的检测识别,能够在大数据层面准确地识别低零值绝缘子,减少人力,物力以及财力。
3)本文采用灰狼算法优化支持向量机参数,并采用高斯径向基核函数,得到的识别模型识别效果好。
-
![]()
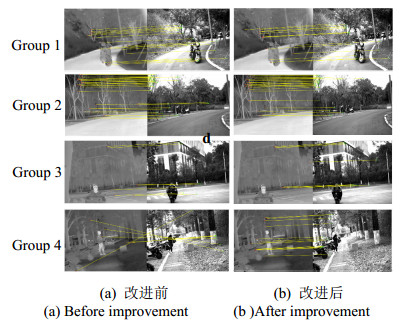
图 2 改进前后的粗匹配示意图
Figure 2. Schematic diagram of rough matching before and after improvement
![]()
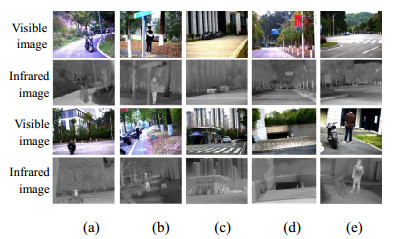
图 3 交通场景分类图例:(a)~(e)分别是非机动车场景、行人场景、机动车场景、道路岔口场景、混合交通场景
Figure 3. Traffic scenario classification legend: (a) to (e) are respectively non-motor vehicle scene, pedestrian scene, motor vehicle scene, road fork scene, and mixed traffic scene
![]()
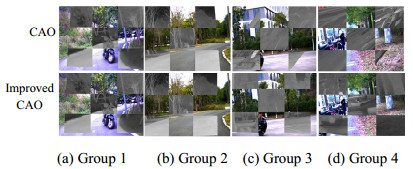
图 6 各场景图像配准融合结果:(a) 行人场景;(b) 非机动车场景;(c) 机动车场景;(d) 道路岔口场景;(e) 混合交通场景
Figure 6. Image registration fusion results of each scene: (a) Pedestrain scene; (b) Non-motorized vehicle scene; (c) Motorized vehicle scene (d) Road intersection scene; (e) Mixed traffic scene
![]()
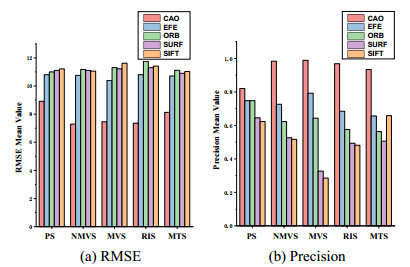
图 7 五种算法在各场景中的RMSE值和precision值
注:PS为行人场景、NMVS非机动车场景、MVS为机动车场景、RIS为道路岔口场景、MTS为混合交通场景
Figure 7. RMSE values and precision values of the five algorithms in each scenario
Note: PS is pedestrain scene; NMVS is non-motorized vehicle scene; MVS is motorized vehicle scene; RIS is road intersection scene; MTS is mixed traffic scene
![]()
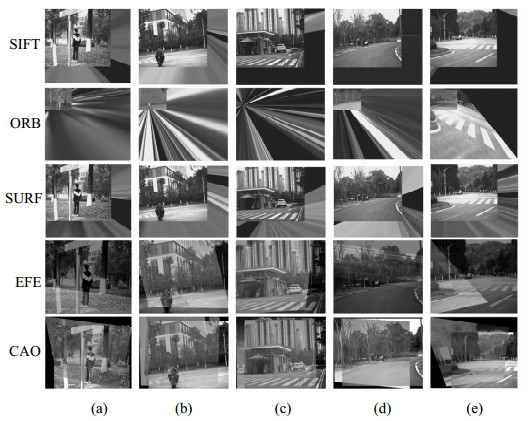
图 10 边缘特征提取算法和改进前后CAO算法在复杂视角偏差组中性能表现
Figure 10. Performance of edge feature extraction algorithm and CAO algorithm before and after improvement in complex angle of view deviation groups
![]()
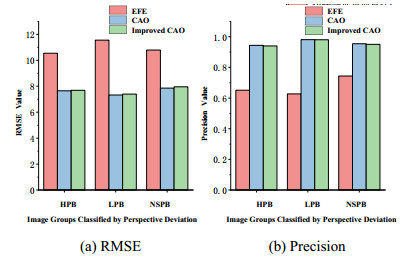
图 11 边缘特征提取算法和改进前后CAO算法在水平偏差、纵向偏差、无明显视角偏差组中性能表现
Figure 11. Performance of edge feature extraction algorithm and CAO algorithm before and after improvement in horizontal deviation, longitudinal deviation and no obvious angle of view deviation groups
![]()
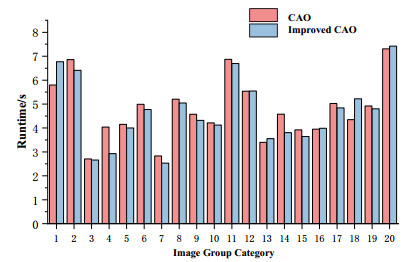
图 12 算法改进前后运行耗时对比
Figure 12. Comparison of running time before and after algorithm improvement
表 1 按场景分类图像对数量
Table 1 Classifies the number of image pairs by scene
Scene classification Number of image pairs Pedestrian 5 Non-motorized vehicle 2 Motorized vehicle 2 Road intersection 5 Mixed traffic 6  下载: 导出CSV
下载: 导出CSV
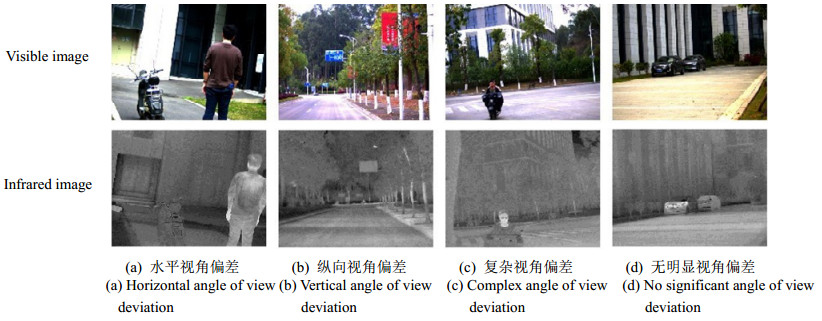
表 2 按视角偏差分类图像对数量
Table 2 Categorizes the number of image pairs according to viewpoint deviation
Classification of angle of view deviation Horizontal angle of view deviation Vertical angle of view deviation Complex angle of view deviation No significant angle of view deviation Number of image pairs 7 2 5 6
下载: 导出CSV
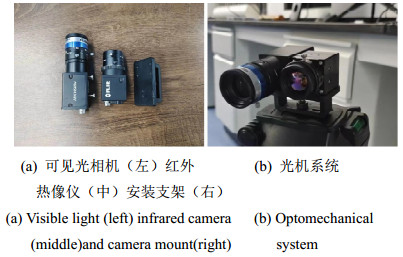
表 3 实验器材信息
Table 3 Information of the experimental equipment
Experimental equipment Related parameters Visible light camera Hikvision camera, resolution: 2048×1536, Focal length: 12 mm Infrared camera FLIR infrared camera, resolution: 640×480, Focal length: 16 mm Test platform AMD 5600X processor, 16 G memory
下载: 导出CSV
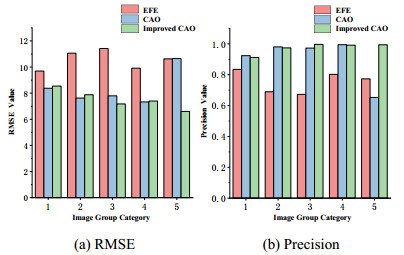
表 4 边缘特征提取算法和改进前后CAO算法的RMSE平均值与Precision平均值
Table 4 RMSE and precision average values of edge feature extraction algorithm and CAO algorithm before and after improvement
EFE CAO Improved CAO RMSE mean value 10.70 7.90 7.64 Precision mean value 0.70 0.94 0.96
下载: 导出CSV
表 5 算法改进前后在各视角偏移中的平均运行耗时
Table 5 The average running time of each angle of view offset before and after algorithm improvement
Evaluation metrics Comparison algorithm Horizontal deviation Longitudinal deviation Complex deviation No deviation Average runtime/s Original algorithm 4.58 4.79 4.63 5.14 Improved algorithm 4.50 4.24 4.59 5.07
下载: 导出CSV
-
[1] HONG R, XIANG C L, LIU H, et al. Visualizing the knowledge structure and research evolution of infrared detection technology studies[J]. Information, 2019, 10(7): 227. DOI: 10.3390/info10070227
[2] LI S T, KANG X D, FANG L Y, et al. Pixel-level image fusion: a survey of the state of the art [J]. Information Fusion, 2017, 33: 100-112. DOI: 10.1016/j.inffus.2016.05.004
[3] MA J Y, MA Y, LI C. Infrared and visible image fusion methods and applications: a survey[J]. Information Fusion, 2019, 45: 153-178. DOI: 10.1016/j.inffus.2018.02.004
[4] Castillo J C, Fernandez-Caballero A, Serrano-Cuerda J, et al. Smart environment architecture for robust people detection by infrared and visible video fusion[J]. Journal of Ambient Intelligence and Humanized Computing, 2017, 8(2): 223-237. DOI: 10.1007/s12652-016-0429-5
[5] Fendri E, Boukhriss R R, Hammami M. Fusion of thermal infrared and visible spectra for robust moving object detection[J]. Pattern Analysis and Applications, 2017, 20(4): 907-926. DOI: 10.1007/s10044-017-0621-z
[6] Apatean A, Rogozan A, Bensrhair A. Visible-infrared fusion schemes for road obstacle classification[J]. Transportation Research Part C-Emerging Technologies, 2013, 35: 180-192. DOI: 10.1016/j.trc.2013.07.003
[7] DONG Yakui, FEI Cheng, ZHAO Guopeng, et al. Registration method for infrared and visible image of sea surface vessels based on contour feature[J]. Heliyon, 2023, 9(3): 14166-14176. DOI: 10.1016/j.heliyon.2023.e14166
[8] Kumar K S, Kavitha G, Subramanian R, et al. MATLAB-A Ubiquitous Tool for the Practical Engineer[M]. Croatia: InTech, 2011: 307-326.
[9] 李大华, 郑文鹏, 李璇, 等. 基于局部归一化的电力设备红外与可见光图像配准[J/OL]. 激光与光电子学进展, 2025, 62(6): 0637007. LI Dahua, ZHENG Wengpeng, LI Xuan, et al. Infrared and visible image registration of power equipment based on local normalization[J]. Laser & Optoelectronics Progress, 2025, 62(6) : 0637007.
[10] 程国华, 王阿川, 陈舒畅, 等. 多源遥感影像高精度自动配准方法研究[J]. 液晶与显示, 2016, 31(6): 604-612. CHEN Guohua, WANG Achuan, CHEN Shuchang, et al. High accuracy-automatic registration method research on multi-source remote sensing image[J]. Liquid Crystals and Displays, 2016, 31(6): 604-612.
[11] 谭东杰, 张安. 方向相关与互信息加权组合多模图像配准方法[J]. 红外与激光工程, 2013, 42(3): 836-841. DOI: 10.3969/j.issn.1007-2276.2013.03.067 TAN Dongjie, ZHANG an, Multi-model image registration based on weighted orientation correlation and mutual information[J]. Infrared and Laser Engineering, 2013, 42(3): 836-841. DOI: 10.3969/j.issn.1007-2276.2013.03.067
[12] 李云红, 刘宇栋, 苏雪平, 等. 红外与可见光图像配准技术研究综述[J]. 红外技术, 2022, 44(7): 641-651. http://hwjs.nvir.cn/article/id/77ef812e-5018-435f-a023-771b550bedc7 LI Yunhong, LIU Yudong, SU Xueping, et al. Review of infrared and visible image registration[J]. Infrared Technology, 2022, 44(7): 641-651. http://hwjs.nvir.cn/article/id/77ef812e-5018-435f-a023-771b550bedc7
[13] 吴延海, 张程, 张烨. 基于梯度信息和区域互信息的图像配准[J]. 广西大学学报: 自然科学版, 2017, 42(2): 720-727. WU Yanhai, ZHANG Cheng, ZHANG Ye. Image registration based on gradient and regional mutual information[J]. Journal of Guangxi University(Natural Science Edition), 2017, 42(2): 720-727.
[14] 孙凤杰, 赵孟丹, 刘威, 等. 基于方向场的输电线路间隔棒匹配定位算法[J]. 中国电机工程学报, 2014, 34(1): 206-213. SUN Fengjie, ZHAO Mengdan, LIU Wei, et al. Spacer matching and localization algorithm for transmission line video images based on directional field[J]. Proceedings of the CSEE, 2014, 34(1): 206-213.
[15] 刘刚, 周珩, 梁晓庚, 等. 非下采样轮廓波域红外与可见光图像配准算法[J]. 计算机科学, 2016, 43(11): 313-316. DOI: 10.11896/j.issn.1002-137X.2016.11.061 LIU Gang, ZHOU Heng, LIANG Xiaogeng, et al. Image registration algorithm for infrared and visible light based on non-subsampled contourlet transform[J]. Computer Science, 2016, 43(11): 313-316. DOI: 10.11896/j.issn.1002-137X.2016.11.061
[16] MA J, JIANG X, FAN A, et al. Image matching from handcrafted to deep features: a survey[J]. International Journal of Computer Vision, 2021, 129(1): 23-79. DOI: 10.1007/s11263-020-01359-2
[17] MOREL J M, YU G. ASIFT: A new framework for fully affine invariant image comparison[J]. SIAM Journal on Imaging Sciences, 2009, 2(2): 438-469. DOI: 10.1137/080732730
[18] YANG N, YANG Y, LI P, et al. Research on infrared and visible image registration of substation equipment based on multi-scale Retinex and ASIFT features[C]//Sixth International Workshop on Pattern Recognition. International Society for Optics and Photonics, 2021, 11913: 1191303.
[19] BAY H, ESS A, TUYTELAARS T, et al. Speeded-up robust features (SURF)[C]//European Conference on Computer Vision(ECCV), 2006, 3951(1): 404-417.
[20] JIANG Q, LIU Y, YAN Y, et al. A contour angle orientation for power equipment infrared and visible image registration[J]. IEEE Transactions on Power Delivery, 2021, 36(4): 2559-2569. DOI: 10.1109/TPWRD.2020.3011962
[21] 李云红, 罗雪敏, 苏雪平, 等. 基于改进曲率尺度空间算法的电力设备红外与可见光图像配准[J]. 激光与光电子学进展, 2022, 59(12): 138-145. LI Yunhong, LUO Xuemin, SU Xueping, et al. Registration method for power equipment infrared and visible images based on improved curvature scale space algorithm[J]. Progress in Laser and Optoelectronics, 2022, 59(12): 138-145.
[22] CHENG T, GU J, ZHANG X, et al. Multimodal image registration for power equipment using clifford algebraic geometric invariance[J]. Energy Reports, 2022, 8: 1078-1086. DOI: 10.1016/j.egyr.2022.02.192
[23] 陈亮, 周孟哲, 陈禾. 一种结合边缘区域和互相关的图像配准方法[J]. 北京理工大学学报, 2016, 36(3): 320-325. CHEN Liang, ZHOU Mengzhe, CHEN He, A method for image registration combined by edge region and cross correlation[J]. Transactions of Beijing Institute of Technology, 2016, 36(3): 320-325.
[24] 付添, 邓长征, 韩欣月, 等. 基于深度学习的电力设备红外与可见光图像配准[J]. 红外技术, 2022, 44(9): 936-943. http://hwjs.nvir.cn/article/id/1f007d8f-ee0d-4cd3-b609-1084e911d70a FU Tian, DENG Changzheng, HAN Xinyue, et al. Infrared and visible image registration for power equipment based on deep learning[J]. Infrared Technology, 2022, 44(9): 936-943. http://hwjs.nvir.cn/article/id/1f007d8f-ee0d-4cd3-b609-1084e911d70a
[25] 赵俊梅, 张利平. 复杂天气和环境下交通标志图像特征匹配技术的研究[J]. 车辆与动力技术, 2022(4): 38-43. ZHAO Junmin, ZHANG Liping. Research on image feature matching technology of traffic signs in complex weather and environment[J]. Vehicle & Power Technology, 2022(4): 38-43.
[26] 姜骞, 刘亚东, 方健, 等. 基于轮廓特征的电力设备红外和可见光图像配准方法[J]. 仪器仪表学报, 2020, 41(11): 252-260. JIANG Qian, LIU Yadong, FANG Jian, et al. Registration method for power equipment infrared and visible images based on contour feature[J]. Chinese Journal of Scientific Instrument, 2020, 41(11): 252-260.
[27] 徐伯庆, 孙国强, 陈离. 数字图像缩放的原理与硬件实现[J]. 上海理工大学学报, 2002, 24(3): 222-225. DOI: 10.3969/j.issn.1007-6735.2002.03.005 XU Boqing, SUN Guoqiang, CHEN Li. The principle and hardware implementation of digital image scaling[J]. Journal of University of Shanghai for Science and Technology, 2002, 24(3): 222-225. DOI: 10.3969/j.issn.1007-6735.2002.03.005
[28] 余先川, 吕中华, 胡丹. 遥感图像配准技术综述[J]. 光学精密工程, 2013, 21(11): 2960-2972. YU Xianchuan, LV Zhonghua, HU Dan. Review of remote sensing image registration techniques[J]. Optics and Precision Engineering, 2013, 21(11): 2960-2972.
[29] 陈勇, 皮德富, 周士源, 等. 基于小波变换的红外图像融合技术研究[J]. 红外与激光工程, 2001, 30(1): 3. CHEN Yong, PI Defu, ZHOU Shiyuan, et al. Study for infrared image fusion based on wavelet transform[J]. Infrared and Laser Engineering, 2001, 30(1): 3.
[30] Rublee E, Rabaud V, Konolige K, et al. ORB: an efficient alternative to SIFT or SURF[C]//International Conference on Computer Vision, 2011, 2564-2571(DOI: 10.1109/ICCV.2011.6126544).
-
期刊类型引用(11)
1. 叶萧然,杜玉红,刘群坡. 深度学习下直流输电线路绝缘子破损识别仿真. 计算机仿真. 2024(01): 251-255 .  百度学术
百度学术
2. 李旭卿,李光亚,张志艺,王子一. 基于改进YOLOv5的电力设备轻量化检测算法. 光电子技术. 2024(01): 47-53 . 百度学术
3. 宋恒东,王海亮,张瑞曦,张东东,程祺. 光纤电场检测机器人对零值绝缘子局部电场畸变的影响研究. 光学与光电技术. 2024(04): 119-126 . 百度学术
4. 赵小平,闵忠兵,薛运强,莫振龙,张姝玮,龚俊,喻佳. 新手驾驶人疲劳状态下的视觉特性研究. 重庆理工大学学报(自然科学). 2023(01): 149-157 . 百度学术
5. 董懿飞,王晓杰,王仁书,许军,舒胜文,陶贻青. 基于一维残差网络的复合绝缘子发热缺陷检测. 红外技术. 2023(06): 663-670 . 本站查看
6. 袁聪,袁梓丰. 基于单帧同位叠加的220 kV绝缘子串紫外动态图像诊断研究. 广东电力. 2023(06): 111-118 . 百度学术
7. 夏立伟,张楚谦,尹洪,吴启进,刘春堂. 基于紫外和红外光谱联合的低零值绝缘子状态监测技术研究. 粘接. 2023(08): 180-184 . 百度学术
8. 尹林,胡京,王文彬,贺林轩,周恺,苏朝辉,闫磊,刘若溪,王博,屠幼萍. 环境条件对基于无人机红外检测的零值绝缘子检测判据的影响研究. 电瓷避雷器. 2023(05): 171-177 . 百度学术
9. 张慧,韩新宁,韩惠丽,常莉红. 基于引导滤波二尺度分解的红外与可见光图像融合. 红外技术. 2023(12): 1216-1222 . 本站查看
10. 陆毅. 基于广义精细复合多尺度散布熵的机车轮对轴承智能诊断方法. 机械设计与研究. 2022(04): 119-124+137 . 百度学术
11. 于晓,李朝. 基于多特征融合的红外图像分类研究. 红外. 2022(10): 32-42 . 百度学术
其他类型引用(6)










计量
- 文章访问数: 136
- HTML全文浏览量: 21
- PDF下载量: 42
- 被引次数: 17
