
Measurement and Analysis of Infrared Radiation Characteristics of Taxiing Unmanned Aerial Vehicles
-
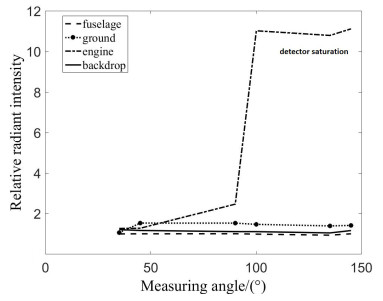
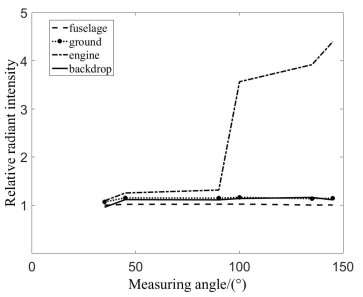
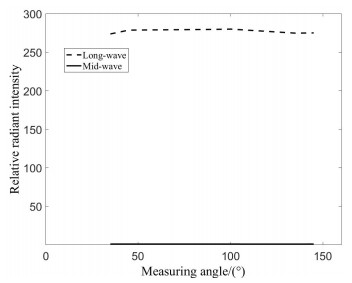
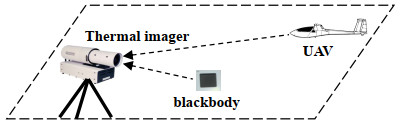
摘要: 为准确得到某型无人机红外辐射特性,用3.7~4.8 μm中波、7.7~10.3 μm长波红外热像仪对某型无人机地面滑跑状态的红外辐射亮度进行了测量,用MODTRAN大气辐射传输软件对测量过程的大气透过率、大气程辐射进行了计算。测量结果表明,该状态下无人机机身蒙皮辐射较弱,辐射亮度与地面及背景辐射亮度接近,且各个方向辐射亮度基本一致,长波波段机身蒙皮辐射亮度为相应部位中波波段辐射亮度的280倍左右;发动机辐射亮度远高于机身蒙皮辐射亮度,受机身遮挡、机体结构等原因影响,发动机辐射亮度具有方向性,后向辐射最强。Abstract: To accurately obtain the infrared radiation characteristics of an unmanned aerial vehicle (UAV), its infrared radiation luminance was measured with medium- and long-wave infrared thermal imagers of 3.7–4.8 μm and 7.7–10.3 μm, respectively, and the atmospheric transmittance and atmospheric radiation during measurement were calculated with the MODTRAN atmospheric radiation transmission software. The measurement results show that under these conditions, the radiation of the UAV fuselage skin is weak, the radiation brightness is close to the ground and background radiation brightness, and the radiation brightness is essentially the same in all directions. The radiation brightness of the fuselage skin in the long-wave band was approximately 280 times that of the corresponding part in the medium-wave band. The engine radiation brightness was much higher than that of the fuselage skin. For reasons such as fuselage shelter and structure of the body, the engine radiation brightness is directional, and the radiation is strongest in the backward direction.
-
-
![]()
图 4 中波辐射亮度与测量角度关系
Figure 4. Relationship between mid-wave radiant intensity and test angle
![]()
图 5 长波辐射亮度与测量角度关系
Figure 5. Relationship between long-wave radiant intensity and test angle
表 1 红外热像仪参数
Table 1 Technical parameters of measuring equipment
Parameters Mid-wave Long-wave Wavelength/μm 3.7-4.8 7.7-10.3 Focal length/mm 150 150 Pixel size/μm 28×25 28×25 Resolution/mrad 0.18 0.18 Digitalizing bit /bit 14 14  下载: 导出CSV
下载: 导出CSV
表 2 ISDC IRl50黑体参数
Table 2 Technical parameters of ISDC IRl50 blackbody
Parameters Value Temperature range/℃ 50-500 Irradiation area/mm2 300×300 Emissivity 0.96±0.02 Temperature resolution /℃ 0.1 Temperature accuracy/℃ ±0.2 Temperature stability/℃ 0.2
下载: 导出CSV
-
[1] 朱平安, 张晓龙. 无人机载制导炸弹的发展综述[J]. 四川兵工学报, 2015, 36(3): 5-8. https://www.cnki.com.cn/Article/CJFDTOTAL-CUXI201503002.htm ZHU Pinan, ZHANG Xiaolong. Review of development of UAV airborne guided bomb[J]. Journal of Sichuan Ordnance, 2015, 36(3): 5-8. https://www.cnki.com.cn/Article/CJFDTOTAL-CUXI201503002.htm
[2] 郭昊, 周德云, 张堃. 无人作战飞机空战自主机动决策研究[J]. 电光与控制, 2010, 17(8): 28-32. https://www.cnki.com.cn/Article/CJFDTOTAL-DGKQ201202024.htm GUO Hao, ZHOU Deyun, ZHANG Kun. Study on UCAV autonomous air combat maneuvering decision-making[J]. Electronics Optics & Control, 2010, 17(8): 28-32. https://www.cnki.com.cn/Article/CJFDTOTAL-DGKQ201202024.htm
[3] 王军, 高教波, 胡煌. 无人侦察机红外辐射特性测试与视距估算[J]. 红外与激光工程, 2008, 37(增刊): 504-509. https://cpfd.cnki.com.cn/Article/CPFDTOTAL-ZYHG200807001039.htm WANG Jun, GAO Jiaobo, HU Yu. Infrared radiation characteristic measuring and visual range prediction of reconnaissance unmanned aerial vehicle[J]. Infrared and Laser Engineering, 2008, 37(S): 504-509. https://cpfd.cnki.com.cn/Article/CPFDTOTAL-ZYHG200807001039.htm
[4] 许爱华, 汪中贤, 于坚, 等. 高空高速无人机尾焰红外辐射特性计算研究[J]. 红外与激光工程, 2012, 41(7): 1700-1707. https://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201207006.htm XU Aihua, WANG Zhongxian, YU Jian, et al. Numerical simulation of infrared radiation characteristics for plume of the high-altitude and high-speed UAV[J]. Infrared and Laser Engineering, 2012, 41(7): 1700-1707. https://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201207006.htm
[5] 徐顶国, 桑建华, 罗明东. 背景辐射下的无人机红外辐射特征仿真研究[J]. 激光与红外, 2013, 43(6): 649-653. https://www.cnki.com.cn/Article/CJFDTOTAL-JGHW201306013.htm XU Dingguo, SANG Jianhua, LUO Mingdong. Simulation study on the infrared radiation characteristics of UAV under the background radiation[J]. Laser & Infrared, 2013, 43(6): 649-653. https://www.cnki.com.cn/Article/CJFDTOTAL-JGHW201306013.htm
[6] 徐顶国, 桑建华, 罗明东. 红外隐身技术在无人机上的应用研究[J]. 红外与激光工程, 2012, 41(12): 3154-3159. https://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201212003.htm XU Dingguo, SANG Jianhua, LUO Mingdong. Research on application of UAVS′ infrared stealth technology[J]. Infrared and Laser Engineering, 2012, 41(12): 3154-3159. https://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201212003.htm
[7] 孙占久, 聂宏, 黄伟. 无人机红外辐射特性计算与分析[J]. 红外与激光工程, 2014, 43(4): 1037-1046. https://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201404004.htm SUN Zhanjiu, NIE Hong, HUANG Wei. Calculation and analysis on infrared radiation characteristics of UAV[J]. Infrared and Laser Engineering, 2014, 43(4): 1037-1046. https://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201404004.htm
[8] 杨词银, 张建萍, 郭立红, 等. 基于大气修正的目标红外辐射测量[J]. 长春理工大学学报, 2010(4): 1-4. https://www.cnki.com.cn/Article/CJFDTOTAL-CGJM201004002.htm YANG Ciyin, ZHANG Jianping, GUO Lihong, et al. Infrared signature measurement of targets based on atmospheric correction[J]. Journal of Changchun University of Science and Technology, 2010(4): 1-4. https://www.cnki.com.cn/Article/CJFDTOTAL-CGJM201004002.htm
[9] 王东, 赵威, 邵铭, 等. 固定翼飞机地面红外辐射特征测量及分析[J]. 红外技术, 2015, 37(6): 519-522. http://hwjs.nvir.cn/article/id/hwjs201506019 WANG Dong, ZHAO Wei, SHAO Ming, et al. Atmospheric correction in the measurement of infrared radiance[J]. Infrared Technology, 2015, 37(6): 519-522. http://hwjs.nvir.cn/article/id/hwjs201506019
[10] 魏合理, 陈秀红, 詹杰, 等. 红外辐射测量的大气修正[J]. 大气与环境光学学报, 2007, 2(6): 472-478. https://www.cnki.com.cn/Article/CJFDTOTAL-GDJY200706013.htm WEI Heli, CHEN Xiuhong, ZHAN Jie, et al. Atmospheric correction in the measurement of infrared radiance[J]. Journal of Atmosphere and Environmental Optics, 2007, 2(6): 472-478. https://www.cnki.com.cn/Article/CJFDTOTAL-GDJY200706013.htm
-
期刊类型引用(3)
1. 刘文强,姜迈,乔顺利,李宏达. 面向双模态夜视图像的混合尺度融合算法. 兵器装备工程学报. 2024(05): 291-298 .  百度学术
百度学术
2. 王金生,周元元,陈珺. 基于残差Swin Transformer模块的红外与可见光图像融合研究. 苏州市职业大学学报. 2024(02): 55-62 . 百度学术
3. 陈彦林,王志社,邵文禹,杨帆,孙婧. 红外与可见光图像多尺度Transformer融合方法. 红外技术. 2023(03): 266-275 . 本站查看
其他类型引用(2)
计量
- 文章访问数: 122
- HTML全文浏览量: 59
- PDF下载量: 28
- 被引次数: 5
