

Real-time Object Tracking Based on Context Awareness and Scale Adaptation
-
摘要: 针对传统核相关滤波视觉目标跟踪算法在快速运动、背景杂波、运动模糊等情况下跟踪精度低且不能处理尺度变化的问题,提出了一种基于上下文感知和尺度自适应的实时目标跟踪算法。该算法在核相关滤波算法框架的基础上,引入了上下文感知和尺度自适应方法,增加了背景信息且能够处理目标的尺度变化。首先,利用融合了fHOG(fusion histogram of oriented gradient)、CN(color names)和灰度的特征对目标区域进行采样,训练一个二维位移滤波器,然后,在目标区域建立尺度金字塔,利用fHOG对目标区域进行多尺度采样,训练一个一维尺度滤波器,最后,在模型更新阶段改进了更新策略。在标准数据集OTB-2015上对100组视频序列进行的试验结果表明,提出的算法比基准算法(kernel correlation filter, KCF)精度提高了13.9%,成功率提高了14.2%,且优于实验中对比的其他跟踪算法。在尺度变化、运动模糊、快速运动等条件下,提出的算法在准确跟踪的同时,能够保持较高的速度。Abstract: Because the traditional kernel correlation filter algorithm for visual object tracking has low tracking accuracy under fast motion, background clutter, and motion blurring conditions and cannot deal with scale changes, a real-time object tracking algorithm based on context awareness and scale adaptation is proposed. Based on the kernel correlation filter algorithm framework, context-aware and scale-adaptive methods are introduced to add background information and handle changes in the scale of the target. First, the target region is sampled using the features of the fusion histogram of oriented gradient (fHOG), color names (CN), and gray, and a two-dimensional translation filter is trained. Then, a scale pyramid is established in the target area and multi-scale sampling is performed using fHOG on the target area. Following this, a one-dimensional scale filter is trained. Finally, the update strategy is improved in the model updating stage. The experimental results of 100 sets of video sequences in the standard OTB-2015 dataset show that the proposed algorithm showed an improvement in the accuracy by 13.9% as compared with the benchmark algorithm (kernel correlation filter, KCF), and the success rate improved by 14.2%, which is superior to that of other comparison-tracking algorithms considered in the experiment. Under the conditions of scale change, motion blur, and fast motion, the proposed algorithm can maintain a high speed with accurate tracking.
-
Key words:
- correlation filters /
- feature fusion /
- context-aware /
- scale-adaptive
-

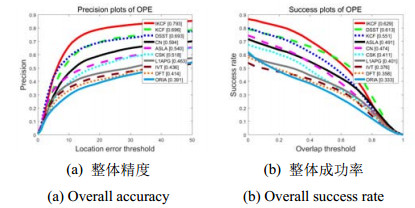
图 5 100个视频序列的精度图和成功率图
Figure 5. Accuracy diagram and success rate diagram of 100 video sequences
表 1 6种最新算法的特点
Table 1. The features of the 6 latest algorithms
Algorithm Feature Scale CSK gray No KCF HOG No DSST Displacement: HOG,gray;Scale: HOG Yes CN gray, CN No ASLA - Yes IKCF Displacement: gray, HOG, CN;Scale: HOG Yes  下载: 导出CSV
下载: 导出CSV
表 2 11种算法运行速度对比
Table 2. Comparison of 11 algorithms' running speeds
fps Algorithm CarDark Car4 David2 Sylvester Trellis Average speed CT 86.93 73.14 54.85 55.39 63.84 66.83 IVT 15.70 16.65 15.20 16.58 17.18 16.26 DFT 13.67 4.07 10.69 7.56 6.38 8.47 ASLA 1.70 1.21 1.56 1.45 1.65 1.51 L1APG 0.77 0.43 0.56 0.57 0.53 0.57 ORIA 22.25 8.19 16.61 4.26 5.61 11.38 CSK 488.46 52.75 482.92 112.83 67.21 240.83 KCF 331.10 22.44 291.70 91.07 42.26 155.72 DSST 54.63 5.32 53.38 14.94 6.96 27.05 CN 155.09 30.38 258.27 81.25 16.42 108.28 IKCF 39.23 9.47 46.56 24.85 9.24 25.87
下载: 导出CSV
-
[1] Yilmaz A. Object tracking: a survey[J]. Acm Computing Surveys, 2006, 38(4): 1-45. http://doi.ieeecomputersociety.org/resolve?ref_id=doi:10.1145/1177352.1177355&rfr_id=trans/tp/2009/07/ttp2009071195.htm [2] Smeulders A W M, Chu D M, Cucchiara R, et al. Visual tracking: an experimental survey[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2014, 36(7): 1442-1468. doi: 10.1109/TPAMI.2013.230 [3] 魏全禄, 老松杨, 白亮. 基于相关滤波器的视觉目标跟踪综述[J]. 计算机科学, 2016, 43(11): 1-5, 18. doi: 10.11896/j.issn.1002-137X.2016.11.001WEI Quanlu, LAO Songyang, BAI Liang. Visual Object Tracking Based on Correlation Filters: A Survey[J]. Computer Science, 2016, 43(11): 1-5, 18. doi: 10.11896/j.issn.1002-137X.2016.11.001 [4] 孟琭, 杨旭. 目标跟踪算法综述[J]. 自动化学报, 2019, 45(7): 1244-1260. https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201907003.htmMENG Lu, YANG Xu. A Survey of Object Tracking Algorithms[J]. Acta Automatica Sinica, 2019, 45(7): 1244-1260. https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201907003.htm [5] 徐康, 龙敏. 增强尺度估计的特征压缩跟踪算法[J]. 红外技术, 2018, 40(12): 1176-1181. http://hwjs.nvir.cn/article/id/hwjs201812010XU Kang, LONG Min. Feature Compression Tracking Algorithm with Enhanced Scale Estimation[J]. Infrared Technology, 2018, 40(12): 1176-1181. http://hwjs.nvir.cn/article/id/hwjs201812010 [6] 刘教民, 郭剑威, 师硕. 自适应模板更新和目标重定位的相关滤波器跟踪[J]. 光学精密工程, 2018, 26(8): 2100-2111. https://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201808032.htmLIU Jiaomin, GUO Jianwei, SHI Shuo. Correlation filter tracking based on adaptive learning rate and location refiner[J]. Optics and Precision Engineering, 2018, 26(8): 2100-2111. https://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201808032.htm [7] 叶瑞哲, 许卓斌. 基于自适应搜索的空时上下文目标跟踪算法[J]. 微电子学与计算机, 2018, 35(6): 88-91. https://www.cnki.com.cn/Article/CJFDTOTAL-WXYJ201806019.htmYE Ruizhe, XU Zhuobin. Spatio-Temporal Context-based Object Tracking Algorithm in Video Surveillance[J]. Microelectronics & Computer, 2018, 35(6): 88-91. https://www.cnki.com.cn/Article/CJFDTOTAL-WXYJ201806019.htm [8] 胡昭华, 钮梦宇, 邵晓雯, 等. 多层深度特征的目标跟踪算法研究[J]. 现代电子技术, 2019, 42(1): 51-56. https://www.cnki.com.cn/Article/CJFDTOTAL-XDDJ201901013.htmHU Zhaohua, NIU Mengyu, SHAO Xiaowen, et al. Research on object tracking method based on multi-level deep feature[J]. Modern Electronics Technique, 2019, 42(1): 51-56. https://www.cnki.com.cn/Article/CJFDTOTAL-XDDJ201901013.htm [9] Bolme D S, Beveridge J R, Draper B A, et al. Visual object tracking using adaptive correlation filters[C]//2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition IEEE, 2010: 2544-2550. [10] Henriques J F, Caseiro R, Martins P, et al. High-speed tracking with kernelized correlation filters[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(3): 583-596. doi: 10.1109/TPAMI.2014.2345390 [11] Felzenszwalb P F, Girshick R B, McAllester D, et al. Object detection with discriminatively trained part-based models[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 32(9): 1627-1645. doi: 10.1109/TPAMI.2009.167 [12] Danelljan M, Shahbaz Khan F, Felsberg M, et al. Adaptive color attributes for real-time visual tracking[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2014: 1090-1097. [13] Van De Weijer J, Schmid C, Verbeek J, et al. Learning color names for real-world applications[J]. IEEE Transactions on Image Processing, 2009, 18(7): 1512-1523. doi: 10.1109/TIP.2009.2019809 [14] Danelljan M, Häger G, Khan F, et al. Accurate scale estimation for robust visual tracking[C]//British Machine Vision Conference, 2014: 1-11. [15] Mueller M, Smith N, Ghanem B. Context-aware correlation filter tracking[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2017: 1396-1404. [16] Henriques J F, Caseiro R, Martins P, et al. Exploiting the circulant structure of tracking-by-detection with kernels[C]//European Conference on Computer Vision, 2012: 702-715. [17] LI Y, ZHU J. A scale adaptive kernel correlation filter tracker with feature integration[C]//European Conference on Computer Vision, 2014: 254-265. [18] WU Y, LIM J, YANG M H. Object Tracking Benchmark[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(9): 1834-1848. doi: 10.1109/TPAMI.2014.2388226 [19] YUN S, CHOI J, YOO Y, et al. Action-decision networks for visual tracking with deep reinforcement learning[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. 2017: 2711-2720. [20] LI Y, FU C, HUANG Z, et al. Keyfilter-aware real-time uav object tracking[C]//2020 IEEE International Conference on Robotics and Automation (ICRA), 2020: 193-199. -





 点击查看大图
点击查看大图
图(7) / 表(2)
计量
- 文章访问数: 318
- HTML全文浏览量: 65
- PDF下载量: 49
- 被引次数: 0
