

Infrared Structured Light for 3D Face Reconstruction
-
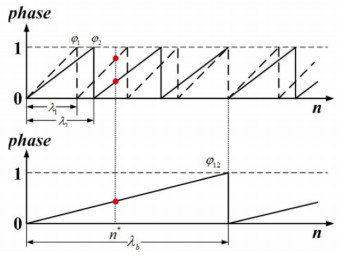
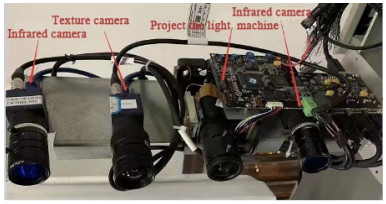
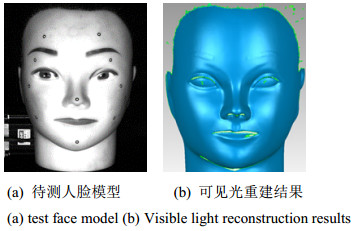
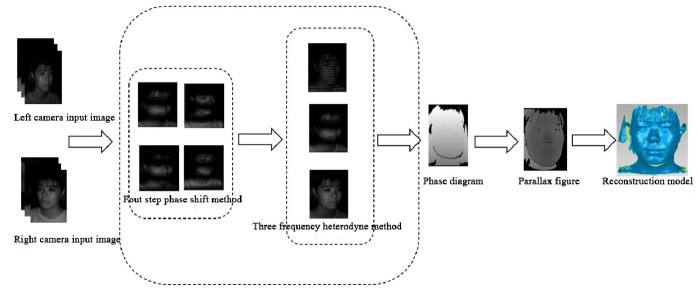
摘要: 在基于结构光的双目三维人脸重建中,容易丢失细节处数据和建模精度较低,导致三维人脸数据完整度不高,对三维人脸识别较差。本文研究了基于红外条纹的双目三维照相机系统,通过投射红外条纹结构光,根据相移法将生成包裹相位,利用三频法得到绝对相位,生成视差图,得到三维人脸模型。实验表明,基于红外的哑铃规球心测距误差在0.1%以内,人脸精度在0.1mm内。在眼睛,眉毛等弱纹理区数据缺失较少,优于基于可见光的三维建模,并且人脸模型更平滑更能反映人脸的真实三维形状。通过对比投射红外与可见光的性能,为三维人脸重建未来研究分析提供技术和算法上的参考。Abstract: In structured-light 3D face reconstruction, it is easy to lose detailed data and obtain reduced modeling accuracy, which leads to low integrity and poor recognition of 3D faces. In this study, a binocular three-dimensional camera system based on an infrared fringe is developed. The wrapped phase is generated using the phase-shift method by projecting infrared fringe-structured light. The absolute phase is obtained using the three-frequency method, and a parallax diagram is generated to obtain a three-dimensional face model. Experiments reveal that measurement errors for the distance of sphere centers are less than 0.1% when measuring standard spheres, and face accuracy is within 0.1 mm. For the eyes, eyebrows, and other areas with weak texture, data loss is reduced, which is better than visible light. The face model varies more smoothly and is more consistent with the real face. This preliminary analysis of the performances of the two proposed techniques can be used as a reference for further comparisons in the analysis of various techniques and algorithms.
-
Key words:
- infrared fringe /
- structed-light /
- binocular vision /
- 3D face modeling
-
表 1 条纹测量结果
Table 1. Measurement of binocular Infrared fringe
A diameter/mm B diameter/mm Center distance /mm A diameter error/mm B diameter error/mm Center distance error/mm Center distance error ratio/% 50.716 50.800 100.045 0.066 0.024 0.040 0.040 50.836 50.778 100.030 0.054 0.011 0.025 0.025 50.767 50.767 100.042 0.016 0.009 0.038 0.038  下载: 导出CSV
下载: 导出CSV
表 2 人脸模型测量结果
Table 2. Measurement of face modeling
Measuring distance/mm Mean absolute error of the fringe model /mm 550 0.097
下载: 导出CSV
-
[1] Sahil Sharma, Vijay Kumar. Voxel-based 3D face reconstruction and its application to face recognition using sequential deep learning[J]. Multimedia Tools and Applications: An International Journal, 2020, 79(25-26): 17303-17330. doi: 10.1007/s11042-020-08688-x [2] WANG Zhenzhou. Robust three-dimensional face reconstruction by one-shot structured light line pattern[J]. Optics and Lasers in Engineering, 2020, 124: 105798. doi: 10.1016/j.optlaseng.2019.105798 [3] CHEN Hui, CUI Wen. A comparative analysis between active structured light and multi-view stereo vision technique for 3D reconstruction of face model surface[J]. Optik, 2020, 206: 164190. doi: 10.1016/j.ijleo.2020.164190 [4] 何文杰, 贺赛先. 双目线结构光测量系统三维数据融合研究[J]. 激光杂志, 2020, 41(6): 10-16. https://www.cnki.com.cn/Article/CJFDTOTAL-JGZZ202006003.htmHE Wenjie, HE Saixian. Research on 3D data fusion of binocular structured light measurement system[J]. Laser Journal, 2020, 41(6): 10-16. https://www.cnki.com.cn/Article/CJFDTOTAL-JGZZ202006003.htm [5] 惠宏超, 严小军, 罗凯元, 等. 基于三频外差法的异构铸件三维测量系统[J]. 导航与控制, 2019, 18(6): 114-120. https://www.cnki.com.cn/Article/CJFDTOTAL-DHKZ201906018.htmHUI Hongchao, YAN Xiaojun, LUO Kaiyuan, et al. Three-dimensional heterogeneous castings measurement system based on tri-frequency heterodyne principle[J]. Navigation and Control, 2019, 18(6): 114-120. https://www.cnki.com.cn/Article/CJFDTOTAL-DHKZ201906018.htm [6] Turski Jacek. On binocular vision: the geometric horopter and cyclopean eye[J]. Vision Research, 2016, 119: 73-81. doi: 10.1016/j.visres.2015.11.001 [7] ZHOU P, ZHU J, SU X, et al. Experimental study of temporal-spatial binary pattern projection for 3D shape acquisition[J]. Applied Optics, 2017, 56(11): 2995. doi: 10.1364/AO.56.002995 [8] JIE Z, WANG P, LING Y, et al. Left-right comparative recurrent model for stereo matching[C]//2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2018: 3838-3846, Doi: 10.1109/CVPR.2018.00404. [9] 张启灿, 吴周杰. 基于格雷码图案投影的结构光三维成像技术[J]. 红外与激光工程, 2020, 49(3): 70-82. https://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ202003005.htmZHANG Qican, WU Zhoujie. Three-dimensional imaging technique based on Gray-coded structured illumination[J]. Infrared and Laser Engineering, 2020, 49(3): 70-82 https://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ202003005.htm [10] Fan R, Ai X, Dahnoun N. Road surface 3D reconstruction based on dense subpixel disparity map estimation[J]. IEEE Transactions on Image Processing, 2018, 27(6): 1-1. doi: 10.1109/TIP.2018.2824142 [11] CHEN Y C, LIU B Q, HUANG F Y. Ultra-wide field infrared binocular vision epipolar constraint and spatial positioning[J]. Acta Photonica Sinica, 2019, 48(2): 211003. doi: 10.3788/gzxb20194802.0211003 -




 点击查看大图
点击查看大图
图(7) / 表(2)
计量
- 文章访问数: 219
- HTML全文浏览量: 17
- PDF下载量: 65
- 被引次数: 0
