

Anti-occlusion Process of Infrared Target Tracking Based on Correlation Filters
-
摘要: 针对传统的相关滤波算法在红外目标跟踪过程中,目标被完全遮挡后跟踪失效的问题,提出一种结合了多尺度滤波跟踪器和基于深度学习检测器的目标实时跟踪抗遮挡算法。首先使用跟踪器跟踪目标,计算目标的峰值响应强度并比较峰值响应强度与经验阈值的大小以判断目标是否被遮挡或跟踪丢失。然后当目标被遮挡或跟踪丢失时,停止更新跟踪器,由于目标被遮挡后再次进入画面的位置可能会发生巨大变化,并且跟踪器在整个图像中搜索目标的速度特别慢,因此在不降低跟踪精度和速度的情况下,后续帧中采用了检测器检测目标并得到多个目标框。利用检测器得到的目标框,分别利用跟踪器进行相关滤波,针对每个目标框得到一个峰值响应强度,其中峰值响应强度最大且超过经验阈值的目标框即为重新进入画面的目标。通过与多尺度相关滤波算法比较,所提算法在满足实时跟踪的情况下,能有效地解决红外目标被遮挡的问题,具有更高的鲁棒性和精确度。Abstract: Focusing on the issue that traditional correlation filters have poor performance in infrared target tracking with occlusion, an anti-occlusion and real-time target-tracking algorithm based on a multi-scale filter tracker and a deep learning detector is proposed. First, the peak response value is calculated using the tracker; if the peak value is less than the threshold, the target is occluded or tracking is lost. Second, the detector stops updating when the target is occluded or tracking is lost. The position of the target changes significantly when it comes in frame again after occlusion, and the speed of target searching with the tracker will be very slow. At this time, a detector is employed to detect the targets in the subsequent frames without loss of tracking accuracy and speed. The peak values are calculated for each target box that is detected by the detector, and the target with a maximum peak value larger than the threshold is tracked. The results of the experiment compared with the multi-scale correlation filter show that the proposed real-time tracking algorithm can not only effectively solve infrared target occlusion, but also has higher tracking robustness and accuracy.
-

图 1 基于相关滤波的目标跟踪抗遮挡处理流程图
Figure 1. The schematic illustration of anti-occlusion process of target tracking based on correlation filters

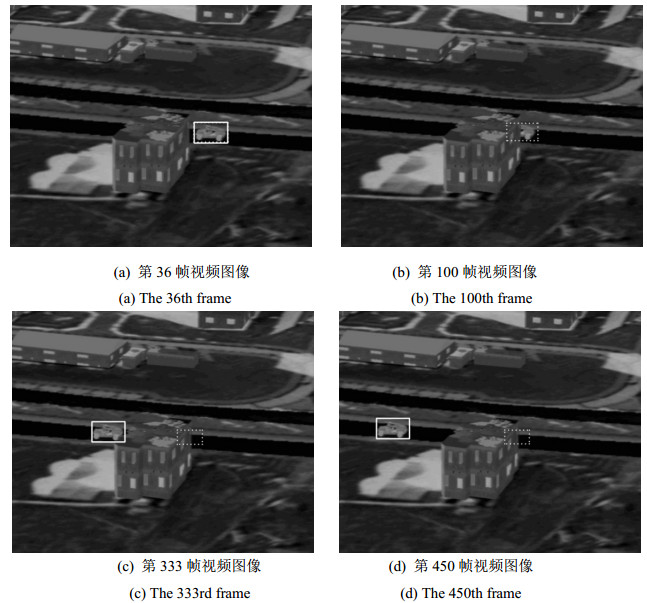
图 2 中波红外下目标跟踪结果(实线:本文算法,虚线:fDSST)
Figure 2. The target tracking results of middle-wave infrared images (solid line: proposed algorithm, dotted line: fDSST)

图 3 长波红外下目标跟踪结果(实线:本文算法,虚线:fDSST)
Figure 3. The target tracking results of long-wave infrared images(solid line: proposed algorithm, dotted line: fDSST)

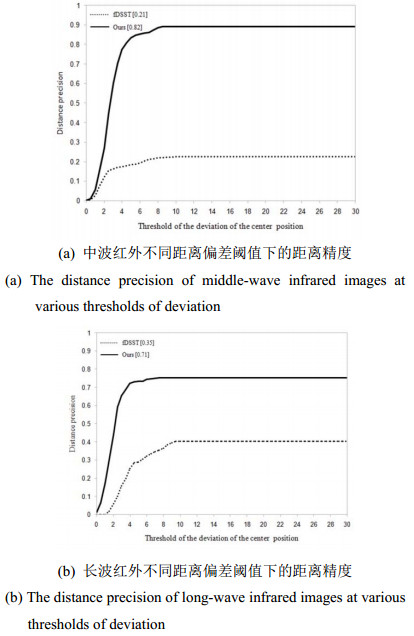
图 4 中波和长波红外下的平均距离精度
Figure 4. The average distance precision of middle-wave and long-wave infrared images

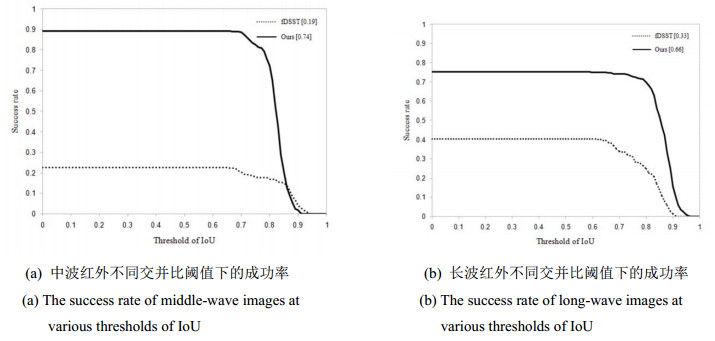
图 5 中波和长波红外下的平均成功率
Figure 5. The average success rate of middle-wave and long-wave infrared images

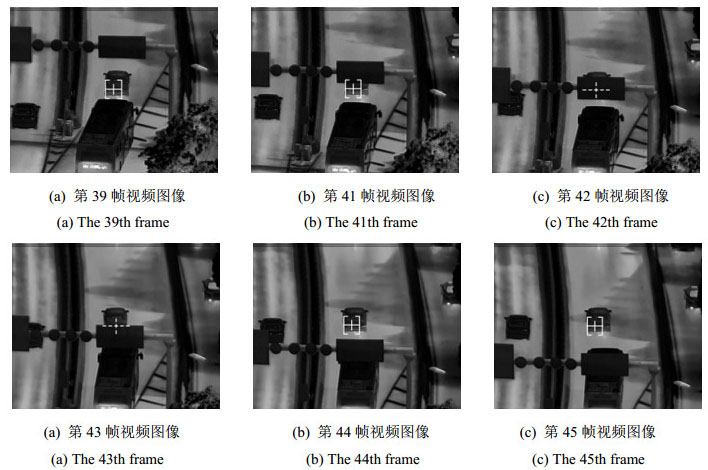
图 6 在线测试场景一跟踪结果(从左至右、从上至下分别为第39、41、42、43、44、45帧)
Figure 6. The tracking result of online test in the first scene(the frame index are 39、41、42、43、44、45 respectively from left to right and from top to bottom)

图 7 在线测试场景二跟踪结果(从左至右、从上至下分别为第69、74、76、79、81、92帧)
Figure 7. The tracking result of online test in the second scene(the frame index are 69、74、76、79、81、92 respectively from left to right and from top to bottom)
表 1 检测器测试结果
Table 1. The test results of detector
Target Image number Precision/% Recall/% Fighter 864 100 99.3 Helicopter 864 99.5 99.7 Patrol 864 100 99.8 Freighter 864 99.6 100 Bus 560 99.4 98.7 Hummer 560 99.3 98.7 Tank 560 97.7 97.3 Truck 560 99.6 98.7  下载: 导出CSV
下载: 导出CSV
表 2 跟踪算法运行速度对比
Table 2. Running speed comparison of tracking algorithms
Algorithm Frames Per Second fDSST 105 Ours 94
下载: 导出CSV
-
[1] 蔡毅. 红外系统中的扫描型和凝视型FPA[J]. 红外技术, 2001, 23(1): 1-5, 18. doi: 10.3969/j.issn.1001-8891.2001.01.002CAI Yi. The scanning and starring FPA in infrared systems[J]. Infrared Technology, 2001, 23(1): 1-5, 18. doi: 10.3969/j.issn.1001-8891.2001.01.002 [2] 范晋祥, 杨建宇. 军用红外成像探测跟踪技术发展趋势与新技术研究进展[C]//第十届全国光电技术学术交流会论文集, 2012: 125-134.FAN Jinxiang, YANG Jianyu. Development trend and research progress of military infrared imaging detection and tracking technology[C]//Proceedings of the 10th National Symposium on Optoelectronic Technology, 2012: 125-134. [3] 王云萍. 美国天基红外导弹预警技术分析[J]. 光电技术应用, 2019, 34(3): 1-7. https://www.cnki.com.cn/Article/CJFDTOTAL-GDYG201903001.htmWANG Yunping. Analysis of space-based infrared missile warning system in America[J]. Electro-Optic Technology Application, 2019, 34(3): 1-7. https://www.cnki.com.cn/Article/CJFDTOTAL-GDYG201903001.htm [4] FU Z, CHANG Z, YONG H, et al. Foreground gated network for surveillance object detection[C]//2018 IEEE Fourth International Conference on Multimedia Big Data (BigMM), 2018: 1-7. [5] Danelljan M, Hager G, Khan F S, et al. Learning spatially regularized correlation filters for visual tracking[C]//IEEE International Conference on Computer Vision, 2015: 4310-4318. [6] Bolme D S, Beveridge J R, Draper B A, et al. Visual object tracking using adaptive correlation filters[C]//The Twenty-Third IEEE Conference on Computer Vision and Pattern Recognition, CVPR, 2010: 13-18. [7] Henriques J F, Rui C, Martins P, et al. Exploiting the circulant structure of tracking-by-detection with kernels[C]//Proceedings of the 12th European Conference on Computer Vision, 2012: 702-715. [8] Henriques J F, Caseiro R, Martins P, et al. High-speed tracking with kernelized correlation filters[C]//IEEE Transactions on Pattern Analysis & Machine Intelligence, 2015, 37: 583-596. [9] Danelljan M, Häger G, Khan F S, et al. Accurate scale estimation for robust visual tracking[C]//British Machine Vision Conference, 2014(65): 1-11. [10] Danelljan M, Häger G, Khan F S, et al. Discriminative scale space tracking[C]//IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(8): 1561-1575. [11] Bochkovskiy A, WANG C Y, LIAO H. YOLOv4: optimal speed and accuracy of object detection[J/OL]. Computer Vision and Pattern Recognition, arXiv: 2004.10934. https://arxiv.org/abs/2004.10934. [12] Felzenszwalb P F, Girshick R B, Mc Allester D, et al. Object detection with discriminatively trained part-based models[C]//IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 32: 1627-1645. [13] WU Y, LIM J, YANG M H. Object tracking benchmark[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2015, 37: 1834-1848. -



 点击查看大图
点击查看大图

计量
- 文章访问数: 204
- HTML全文浏览量: 58
- PDF下载量: 57
- 被引次数: 0
