

Resonance Suppression Method of Vehicle Mounted Lifting Photoelectric Platform
-
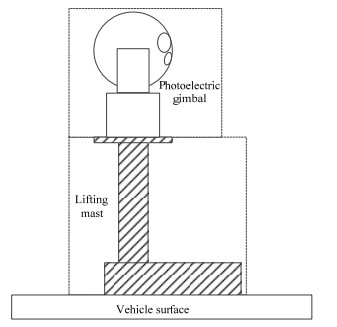
摘要: 为避免视场遮挡,光电云台通常置于升降式桅杆顶端,桅杆的结构刚度将直接影响云台伺服系统的刚度,继而影响云台动态性能。实际使用时发现,由于桅杆刚度不足导致云台在方位向转动过程中极易发生共振,引起云台工作不稳定。针对该问题文中先后引入巴特沃斯低通滤波器、陷波滤波器和线性自抗扰控制方式对升降式光电云台共振现象进行抑制,通过对比三种方式的优缺点发现采用线性自抗扰控制方式具有响应速度快、共振抑制效果好、鲁棒性好的优点,适宜应用于升降式光电云台控制系统。Abstract: To avoid obscuring the field of view, a photoelectric platform is usually placed on top of a lifting mast. The structural stiffness of the mast directly affects the stiffness of the photoelectric platform servo system and its dynamic performance. In actual use, it is deduced that an insufficient stiffness of the mast causes the photoelectric platform to resonate easily in the process of azimuthal rotation, causing it to work unstably. To solve this problem, a Butterworth low-pass filter, notch filter, and linear auto disturbance rejection control mode are introduced successively to suppress the resonance phenomenon of the lifting photoelectric pan tilt table. By comparing the advantages and disadvantages of the three methods, it is concluded that the linear ADRC method has the advantages of fast response, good resonance suppression effect, and good robustness, and is suitable for the control system of the lifting photoelectric photoelectric platform.
-
Key words:
- photoelectric platform /
- lifting mast /
- Butterworth filter /
- notch filter /
- LADRC
-

图 6 PI+一阶250 Hz低通滤波器速度响应曲线
Figure 6. PI + first-order 250 Hz low-pass filter speed response curves

图 7 PI+二阶250 Hz巴特沃斯滤波器速度响应曲线
Figure 7. PI + second-order 250 Hz butterworth filter speed response curves

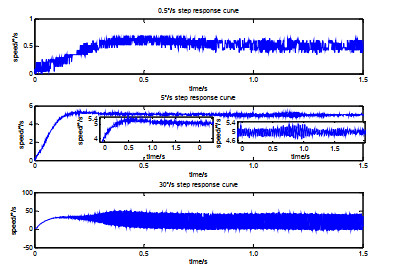
图 8 PI+二阶60 Hz巴特沃斯滤波器速度响应曲线
Figure 8. PI + second-order 60Hz butterworth filter speed response curves

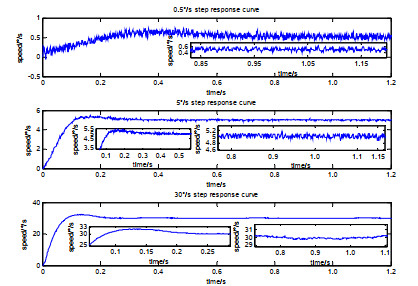
图 10 LADRC+一阶低通滤波器速度响应曲线
Figure 10. LADRC+ first-order low-pass filter speed response curves

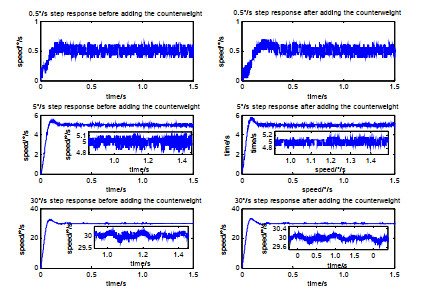
图 11 采用LADRC增加配重前后速度响应曲线
Figure 11. Speed response curves before and after adding the counterweight used LADRC

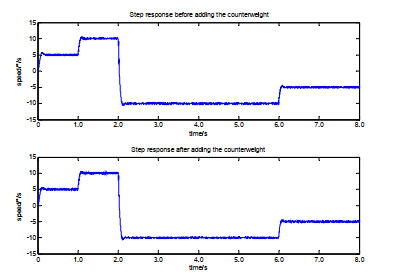
图 12 采用LADRC增加配重前后变速响应曲线
Figure 12. Variable speed response curves before and after adding the counterweight used LADRC
表 1 电机和旋转变压器参数
Table 1. Motor and rotary transformer parameters
J110LWX004 type motor J90XFS001 type rotary transformer Stall torque 1.5 N·m Excitation voltage 4 V Stall current 2 A Excitation frequency 2000 Hz No-load speed 240 rpm Polar number contrast 1:32 Torque coefficient 0.75 N·m/A Precision < 30″ Phase resistance 3.4 Ω Phase inductance 7.5 mH  下载: 导出CSV
下载: 导出CSV
表 2 不同给定转速阶跃响应情况对照表
Table 2. Table of step response at different given speed
Given speed Method Rise time Adjustment time Over-shoot Steady state error 0.5°/s LADRC Fastest Fastest Minimum ±22% Butterworth filter Middle Middle Max ±30% Notch filter Slowest Slowest Middle ±32% 5°/s LADRC 53 ms 135 ms 11% ±4% Butterworth filter 77 ms 240 ms 10% ±2% Notch filter 106 ms 310 ms 9% ±6.4% 30°/s LADRC 45 ms 128 ms 8.6% ±0.7% Butterworth filter 55 ms 174 ms 7.6% ±1.2% Notch filter - - - -
下载: 导出CSV
-
[1] 付存银, 丁少华, 王兆基, 等. 堆垛机速度控制与立柱动态挠曲变形分析[J]. 机械设计与制造, 2019(6): 247-251. https://www.cnki.com.cn/Article/CJFDTOTAL-JSYZ201906064.htmFU Cunyin, DING Shaohua, WANG Zhaoji, et al. Single mast stacker crane speed control and stand column dynamic flexure deformation analysis[J]. Machinery Design & Manufacture, 2019(6): 247-251. https://www.cnki.com.cn/Article/CJFDTOTAL-JSYZ201906064.htm [2] 龚文全, 曾岳南, 黄之锋, 等. 基于改进型陷波器的伺服系统谐振抑制研究[J]. 机电工程, 2018, 37(7): 845-850. https://www.cnki.com.cn/Article/CJFDTOTAL-JDGC202007022.htmGONG Wenquan, ZENG Yuenan, HUANG Zhifeng, et al. Resonance suppression of servo system based on improved notch filter[J]. Journal of Mechanical & Electrical Engineering, 2018, 37(7): 845-850. https://www.cnki.com.cn/Article/CJFDTOTAL-JDGC202007022.htm [3] 龚文全, 罗炳章. 基于自适应陷波滤波器的伺服系统谐振频率估计及抑制[J]. 电机与控制应用, 2019, 46(11): 37-42, 93. https://www.cnki.com.cn/Article/CJFDTOTAL-ZXXD201911008.htmGONG Wenquan, LUO Bingzhang. Resonance frequency estimation and suppression of servo system based on adaptive notch filter[J]. Electric Machine Control Application, 2019, 46(11): 37-42, 93. https://www.cnki.com.cn/Article/CJFDTOTAL-ZXXD201911008.htm [4] 乔治. 埃利斯. 控制系统设计指南[M]. 北京: 机械工业出版社, 2016.George Ellis. Control System Design[M]. Beijing: China Machine Press, 2016. [5] 郭高洁. 伺服控制系统谐振实时抑制方法探究[D]. 北京: 中国科学院大学, 2018.GUO Gaojie. Online resonance suppression exploration of Servo system[D]. University of Chinese Academy of Sciences, 2018. [6] 黄正敏. 滚珠丝杠进给系统二阶陷波滤波抑振法研究[D]. 武汉: 华中科技大学, 2019.HUANG Zhengmin. Research on Second-order Notch Filter Vibration Suppression Method of Ball Screw Feeding System[D]. Wuhan: Huazhong University of Science and Technology, 2019. [7] ZHAO Shen, GAO Zhiqiang. An active disturbance rejection based approach to vibration suppression in two-intertia systems[J]. Asian Journal of Control, 2013, 15(2): 350-362. doi: 10.1002/asjc.552 [8] 李英杰, 李绍军, 蒋鹏, 等. 一种高精度船只目标光电定位系统设计与实现[J]. 红外技术, 2023, 45(10): 1090-1095. http://hwjs.nvir.cn/article/id/59f8a8cc-3d8a-4dc3-be25-11dda4cad2abLI Yingjie, LI Shaojun, JIANG Peng, et al. Design and implementation of a high-precision ship target photoelectric positioning system[J]. Infrared Technology, 2023, 45(10): 1090-1095. http://hwjs.nvir.cn/article/id/59f8a8cc-3d8a-4dc3-be25-11dda4cad2ab -





 点击查看大图
点击查看大图
计量
- 文章访问数: 30
- HTML全文浏览量: 15
- PDF下载量: 10
- 被引次数: 0
