

Design of a Three-Axis Turntable Servo Control Using Wirerope Transmission
-
摘要: 针对某机载平台中钢丝绳传动带来的非线性误差及外部扰动等因素直接影响平台相机成像质量的问题,提出一种模糊自适应前馈补偿的控制策略。首先对钢丝绳传动机构和高精度直流伺服电机进行了建模,并建立了摩擦模型,为转台速度环控制回路引入模糊自适应PID控制器。设计出前馈补偿和模糊自适应控制器的复合控制策略。Matlab仿真结果以及实验表明该复合策略能有效消除飞机振动和钢丝绳非线性带来的抖动,转台的稳定精度从1 mrad提高至0.2 mrad,大幅地提高了成像质量。Abstract: Aiming at the problem of nonlinear errors and external disturbances caused by wirerope transmission in an airborne platform directly affecting the imaging quality of platform cameras, we propose a control strategy using fuzzy adaptive feedforward compensation. First, the wirerope transmission mechanism and a high-precision DC servo motor were modeled, a friction model was established, and a fuzzy adaptive proportional-integral-derivative controller was introduced for the speed loop control loop of the turntable. Based on the principles of feedforward compensation, a feedforward compensation algorithm is proposed. A compound control strategy combining feedforward compensation with a fuzzy adaptive controller is also designed. MATLAB simulation results and experiments demonstrate that this compound strategy can effectively eliminate the jitter caused by aircraft vibration and wirerope nonlinearity. The stability accuracy of the turntable is increased from 1 to 0.2 mrad, which can significantly improve imaging quality.
-
Key words:
- stabilization platform /
- fuzzy PID /
- feed forward control /
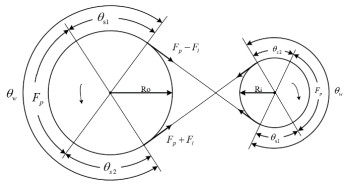
- wirerope transmission /
- adaptive control
-

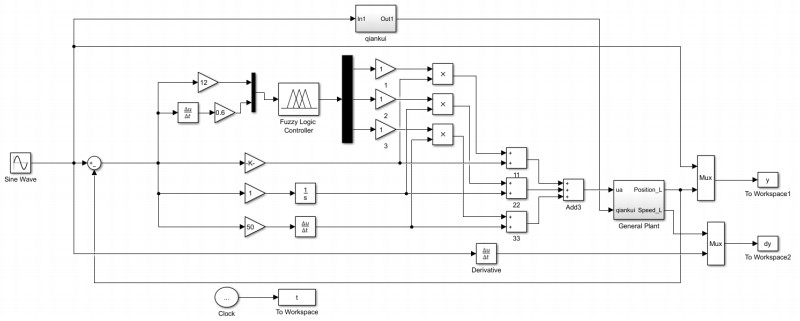
图 6 模糊自适应PID前馈补偿控制仿真模型
Figure 6. Fuzzy adaptive PID feedforward compensation control simulation model
-
[1] 马经帅, 于洵, 刘晓宇, 等. 高精度光电跟踪系统中伺服稳定控制算法研究[J]. 应用光学, 2021, 42(4): 597-607. https://www.cnki.com.cn/Article/CJFDTOTAL-YYGX202104006.htmMA Jingshuai, YU Xun, LIU Xiaoyu, et al. Servo stabilization control algorithm in high-precision photoelectric tracking system[J]. Journal of Applied Optics, 2021, 42(4): 597-607. https://www.cnki.com.cn/Article/CJFDTOTAL-YYGX202104006.htm [2] 鲁亚飞. 精密柔索传动机理与设计方法研究[D]. 长沙: 国防科学技术大学, 2013.LU Yafei. Study on the Principle and Design Method of the Precise Cable Drive[D]. Changsha: National University of Defense Technology, 2013. [3] 张洪文, 曹国华, 李延伟, 等. 钢丝绳传动在航空光学遥感器上的应用[J]. 激光与红外, 2013, 43(4): 418-422. doi: 10.3969/j.issn.1001-5078.2013.04.015ZHANG Hongwen, CAO Guohua, LI Yanwei, et al. Application of wire rope gearing in aerial optical remote sensor[J]. Laser & Infrared, 2013, 43(4): 418-422. doi: 10.3969/j.issn.1001-5078.2013.04.015 [4] 谢宏伟, 陶忠, 侯军占, 等. 多绳精密传动的传动精度实验研究[J]. 兵工学报, 2017, 38(4): 728-734. doi: 10.3969/j.issn.1000-1093.2017.04.014XIE Hongwei, TAO Zhong, HOU Junzhan, et al. Experimental research on transmission accuracy of multi-cable drive[J]. Acta Armamentarii, 2017, 38(4): 728-734. doi: 10.3969/j.issn.1000-1093.2017.04.014 [5] Kilic E, Dolen M. Prediction of slip in cable-drum systems using structured neural networks[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2014, 228(3): 441-456. doi: 10.1177/0954406213487471 [6] Baser O, Konukseven E I. Theoretical and experimental determination of capstan drive slip error[J]. Mechanism and Machine Theory, 2010, 45(6): 815-827. [7] 陈娟. 伺服系统低速特性与抖动补偿研究[D]. 长春: 中国科学院长春光学精密机械与物理研究所, 2001.CHEN Juan. Study on the low velocity properties and jitter compensation for the servo system[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2001. [8] 石文兵, 唐小琦. 基于模糊自整定PID的二质量伺服控制系统的研究[J]. 工业仪表与自动化装置, 2007(2): 3-5. https://www.cnki.com.cn/Article/CJFDTOTAL-GYZD200702000.htmSHI Wenbing, TANG Xiaoqi. A study of two-mass servo control system based on a fuzzy self-tuning PID controller[J]. Industrial Instrumentation & Automation, 2007(2): 3-5. https://www.cnki.com.cn/Article/CJFDTOTAL-GYZD200702000.htm [9] 刘强, 尔联洁, 刘金琨. 摩擦非线性环节的特性、建模与控制补偿综述[J]. 系统工程与电子技术, 2002(11): 45-52. doi: 10.3321/j.issn:1001-506X.2002.11.016LIU Qiang, ER Lianjie, LIU Jinkun. Overview of characteristics, modeling and compensation of nonlinear friction in servo systems[J]. Systems Engineering and Electronics, 2002(11): 45-52. doi: 10.3321/j.issn:1001-506X.2002.11.016 [10] Esfandyari M, Fanaei M A, Zohreie H. Adaptive fuzzy tuning of PID controllers[J]. Neural Computing and Applications, 2013, 23(1): 19-28. [11] Jahed M, Farrokhi M. Robust adaptive fuzzy control of twin rotor MIMO system[J]. Soft Computing, 2013, 17(10): 1847-1860. [12] 孙战磊, 徐开, 王栋, 等. 自适应模糊PID前馈补偿在机载挂飞摆扫转台控制中的应用[J]. 计算机测量与控制, 2015, 23(12): 4071-4074, 4083. https://www.cnki.com.cn/Article/CJFDTOTAL-JZCK201512048.htmSUN Zhanlei, XU Kai, WANG Dong, et al. Application of fuzzy PID adaptive feed forward compensation on swing turntable control mounted on flying helicopter[J]. Computer Measurement and Control, 2015, 23(12): 4071-4074, 4083. https://www.cnki.com.cn/Article/CJFDTOTAL-JZCK201512048.htm [13] 魏贵玲, 王斌, 邓劲松, 等. 一种复合控制器在陀螺稳定平台中的应用[J]. 压电与声光, 2016, 38(3): 415-419. https://www.cnki.com.cn/Article/CJFDTOTAL-YDSG201603017.htmWEI Guiling, WANG Bing, DENG Jinsong, et al. Compound control method is applied in the gyro stabilized platform[J]. Piezoelectrics & Acoustooptics, 2016, 38(3): 415-419. https://www.cnki.com.cn/Article/CJFDTOTAL-YDSG201603017.htm [14] 辛林杰, 魏志强, 李斌. 前馈控制在光电跟踪系统中的应用研究[J]. 电视技术, 2020, 44(4): 27-31. https://www.cnki.com.cn/Article/CJFDTOTAL-DSSS202004006.htmXIN Linjie, WEI Zhiqiang, LI Bin. Research and application of feedforward control in photoelectric tracking system[J]. Video Engineering, 2020, 44(4): 27-31. https://www.cnki.com.cn/Article/CJFDTOTAL-DSSS202004006.htm -

 下载:
下载:



 点击查看大图
点击查看大图

图(11)
计量
- 文章访问数: 130
- HTML全文浏览量: 37
- PDF下载量: 21
- 被引次数: 0
